
大赛作品详情
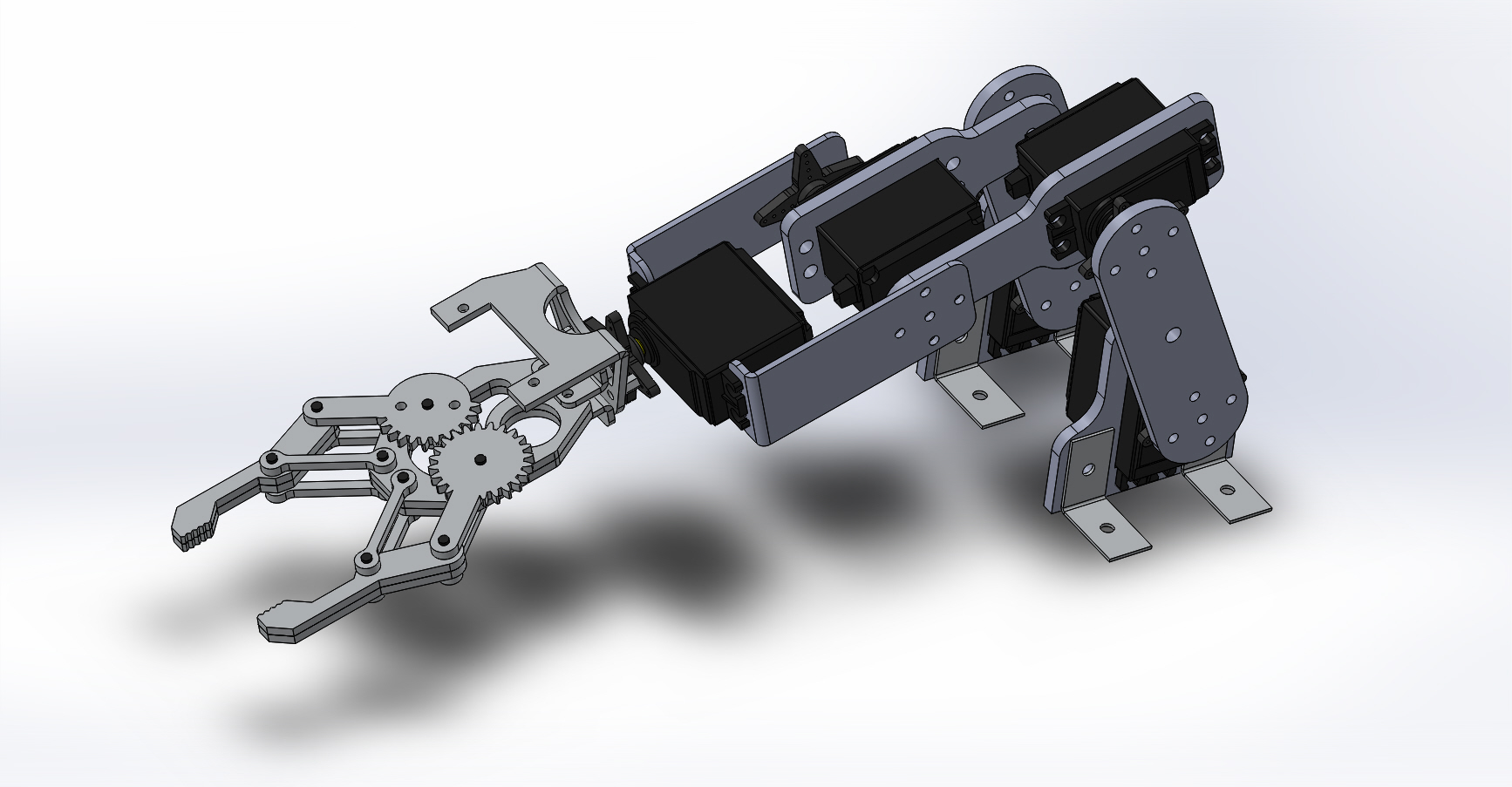
作品名称:基于ROV的海底取样机械手·
学校名称:山东交通学院
参赛队伍:海韵救捞
参赛学生:冯文辉 张百祜 林鑫成
指导老师:潘德位


