
大赛作品详情
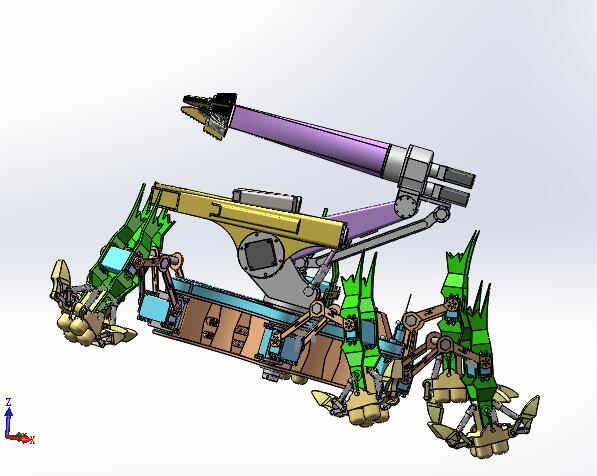
作品名称:基于仿生学原理的六足爬行式市政下水道疏通机器人
学校名称:烟台大学
参赛队伍:所向无前队
参赛学生:常明蕊 张文宪
指导老师:周兵 张春萍


