
大赛作品详情
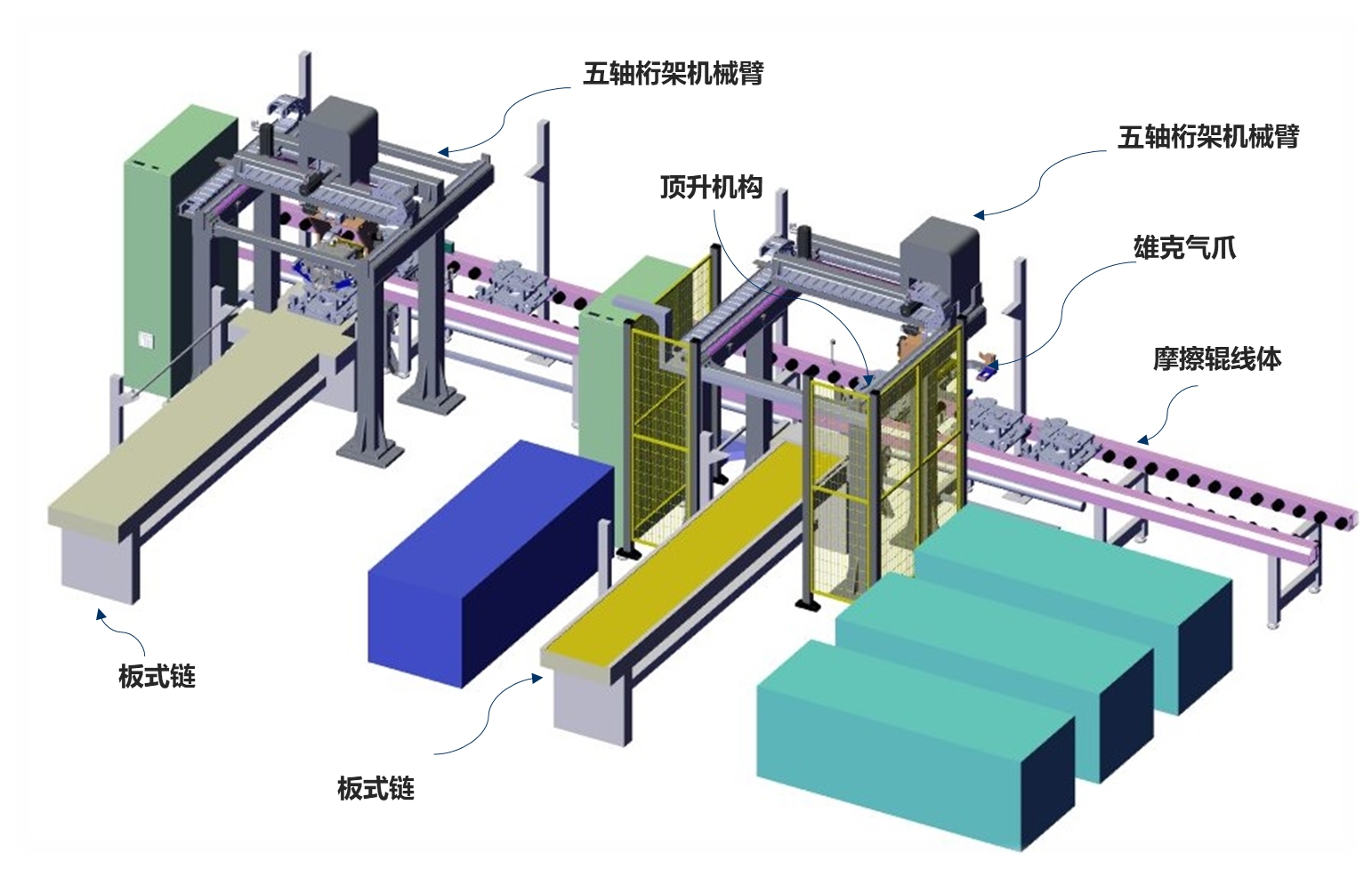
作品名称:五轴桁架机械臂
学校名称:镇江市高等专科学校
参赛队伍:大鹏鸟团队
参赛学生:周杰 丁全福 任宇涵
指导老师:赵飞 杨睿


