四自由度机械手螺丝安装龙门车床
研究背景:
随着工业2.0的发展,大型的机械装配与大量的零件加工需求越来越大。四自由度机械手是一种能模仿人手和臂的某些动作的机器,其用以按固定程序抓取、搬运物件或安装螺丝,兼有人和机械手机器各自的优点。
现有的机械手自由度小,进给量小,难以实现预期的功能。四自由度机械手螺丝安装龙门机床自由度大,构造和性能上兼有人和机械手机器各自的优点。
项目方案
1、项目研究背景
(1)国内外的研究现状及研究意义
自所以本设备综合经济性和实用性,采用分部试小型设备进行检测,更具性价比优势。
国内机械手设备无人工厂”开始投入建设,这标志着当地“机器换人”战略进入新阶段。自车间的革命起,“机器换人”换出产品效益。机械手应“不能简单地把‘机器换人’看成是解决用工难的办法,而是工业制造自动化、精密化、智能化水平提升和产品品质提高的体现。”
目前,一套机器手需要18万元,目前一个工人的年用工成本约6万元,而在不同工序上“机器换人”的替代率不同,由此可见,在大规模装配中机械手的优势极其明显。
(2)项目已有的基础
1)项目组同学已经对风电叶片的检测仪器理进行了较充分的探索研究。
2)盐城工学院模具智能制造研究院能够为项目的实施提供基本的设备和场所。
3)项目小组成员素养良好,具有一定的研发能力和团队协作精神。
(3)与本项目有关的研究积累和已取得的成绩
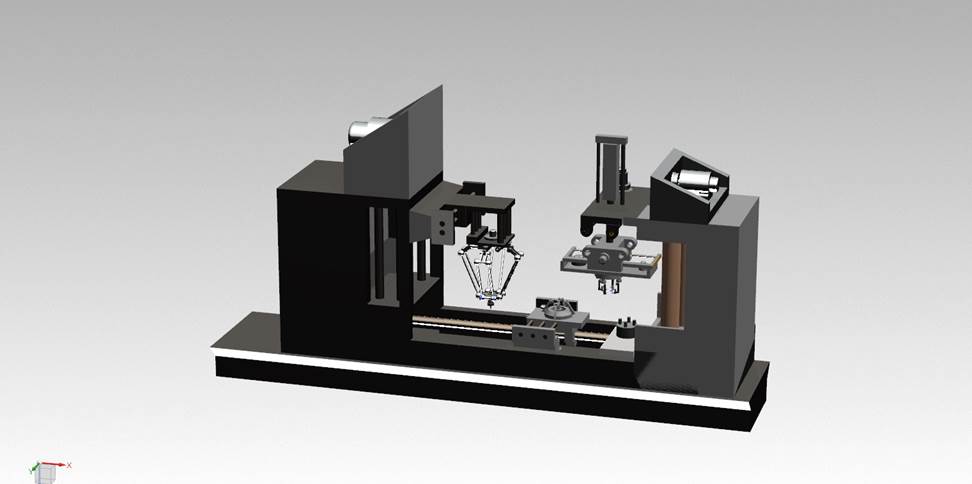
本项目已经熟悉机械手装置工作原理、机械结构、基本参数,对研究对象进行了建模和仿真。
(4)已具备的条件
有设计制造的经验,对市场需求有一定的了解。
2、项目研究目标及主要内容
(1)项目研究目标
与传统机床相比,加工范围广,用途强大,是促进产品研发的必要设备。
(2)项目研究的主要内容
精确化齿轮和丝杠装置,实现精确定位;增加设备电机联机,提升设备一体化率;完整展示机械手螺丝机优点,实现初步建模;使用大自由度机械手,实现大范围装配。
3、研究思路
装置由电气和机械部分组成。电气部分为装置提供动力,实现电机正反转、调速,包括总控制平台、信号采集装置;机械部分用于实现机械手的运动、测量距离的改变,主要包括丝杆、齿轮组、气缸等。
4、项目创新特色概述
1)多自由度。使不同的多方向力实现对机械手的多角度加工;
2)专用夹具。使试样装夹规整、受力均匀,减少损伤;
3)自动行进。检测与夹具设备距离,自动选择最优行程,保证多点距离的相同;
5、项目研究技术路线
(1)操作系统
采用LabVIEW程序设计语言完成测试仪的上位机控制软件的设计,实现机电一体化。
(2)动力系统
采用多个电机作为动力源保证整体动力需求。
(3)传动系统
传动系统由大小齿轮、大小锥齿轮、丝杠、轴承和直线导轨组成。
(4)推进系统
包括丝杠的进给和液压缸的推进。