
大赛作品详情
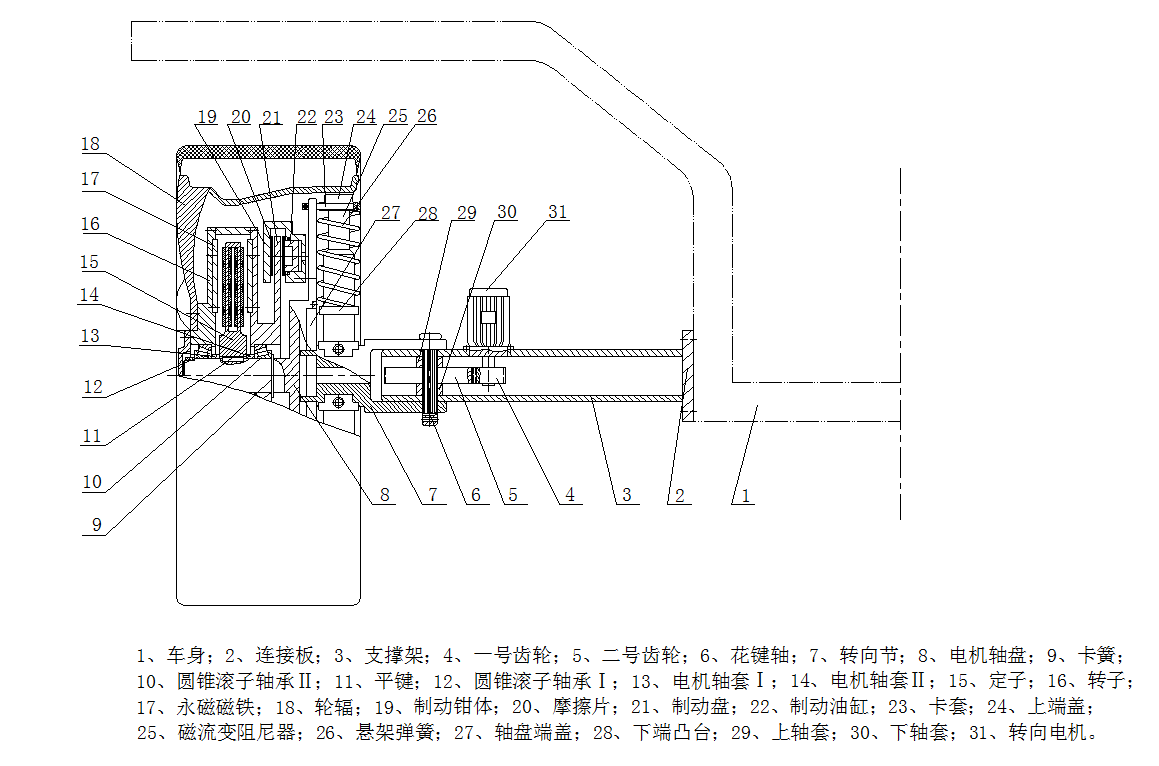
作品名称:智能汽车全向转向装置
学校名称:山东科技大学
参赛队伍:道勤队
参赛学生:王爱波 王凯 耿乐
指导老师:刘晋霞


