机械手番茄采摘车
产品设计背景
一、农业生产现状与需求
近年来,随着农业劳动力不断向其他产业转移,农业劳动力结构性短缺和老龄化问题日
益突出。同时,果蔬采摘作业具有季节性强、劳动量大、作业费用高等特点,人工采摘
的费用通常占全程生产费用的 50%左右。在番茄种植过程中,采摘作业更是耗时费力,
需要投入大量的人力。因此,研发机械手番茄采摘车,降低采摘成本,提高采摘效率,
已成为现代农业发展的重要趋势。
二、机械手采摘技术的发展
机械手采摘技术是一种将机械臂、传感器、控制器等技术与农业生产相结合的新型采摘
方式。自 20 世纪末以来,美国、日本、法国等发达国家开始了对自动采摘机器人的研
究,并取得了一定成果。这些采摘机器人通过模拟人手采摘动作,实现对果蔬的自动采
摘。其中,番茄采摘机器人作为重要的研究方向之一,其研究和应用已取得了一定的进
展。
三、机械手番茄采摘车的设计优势
1. 高效采摘:机械手番茄采摘车可以快速准确地识别并采摘成熟的番茄,提高采摘效
率,降低采摘成本。
2. 智能化管理:通过传感器和控制器等技术,机械手番茄采摘车可以实现对番茄生长
情况的实时监控和管理,为农业生产提供智能化支持。
3. 减轻劳动强度:机械手番茄采摘车可以代替人工进行采摘作业,减轻农民的劳动强
度,提高生产效益。
4. 适应性强:机械手番茄采摘车可以适应不同种植模式和地形条件,具有广泛的应用
前景。
机械手番茄采摘车的设计背景源于现代农业生产的实际需求和技术进步。随着科技的不
断发展,机械手采摘技术将在农业生产中发挥越来越重要的作用。机械手番茄采摘车的
研发和应用将有助于提高番茄采摘效率、降低采摘成本、促进农业生产的智能化和机械
化发展。
总体设计思路
机械手番茄采摘车的设计旨在实现高效、精准的番茄采摘作业,减少人工劳动强
度,提高生产效率。其总体设计思路主要围绕以下几个方面展开:
1. 精准识别与定位:利用机器视觉系统对番茄果实进行高精度检测、识别和定位,确
保采摘的准确性。
2. 灵活高效的机械臂:采用多关节机械臂设计,实现大范围、多角度的灵活运动,满
足番茄采摘过程中对精度的要求。
3. 无损采摘技术:设计专门的末端执行器,通过智能识别果实,剪切果梗精准采摘,
避免果实表皮损伤,保证果实的完整性。
4. 模块化与智能化:采用模块化设计理念,便于系统维护与升级;同时,引入智能化
控制算法,提高系统的自适应性和鲁棒性。
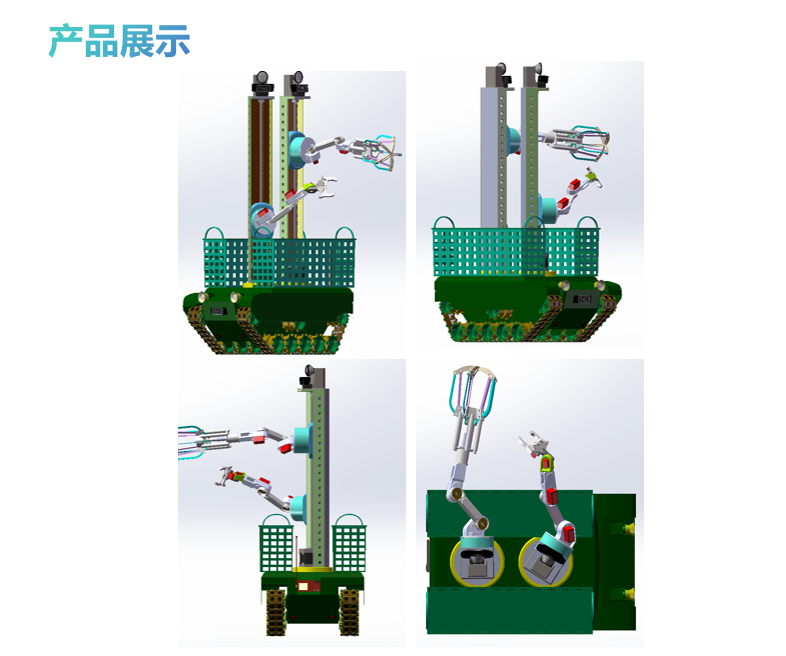
系统结构设计
1. 机械臂结构设计
底座传动:底座采用蜗轮蜗杆传动,电机连接涡杆,涡轮轴上安装涡轮,涡轮轴与
驱动臂座连接,实现机械手整体的回转运动。
大臂摆动:大臂部分由电机连接摆线减速箱,再连接连杆轴和连杆,实现大臂的摆
动,扩大采摘范围。
小臂与手腕:小臂与连杆另一端相连,实现摆动;手腕处采用三个电机连接行星减
速器,连接手腕轴和齿轮,实现腕部中心轴的回转;小手腕处通过锥齿轮配合,实
现小手腕的摆动;手腕与机械手爪通过锥齿轮传动,实现机械手爪的回转。
2. 末端执行器设计
自动校准:通过摄像头和传感器实时调整执行器的位置,确保果实被正确剪下,提
高采摘精度和效率。
3. 视觉系统设计
空间定位:采用双目相机视觉定位系统,通过标定获取相机内外参数,生成视差图,
利用三角测量法计算出番茄果实的三维空间坐标,实现精准定位。
4. 控制系统设计
模块化集成:将视觉检测、机械臂控制、执行器控制等模块进行集成,实现系统的
高效协同工作。
智能控制算法:集成基于深度学习的检测算法与路径规划算法,实现自动导航与采
摘,提高系统的智能化水平。
实时反馈系统:通过传感器实时获取果实与障碍物的位置信息,实时调整机械臂的
路径,确保采摘任务的顺利进行。
机械手番茄采摘车的总体设计思路及系统结构设计充分考虑了精准识别、灵活高
效、无损采摘和模块化智能化等要求,为番茄采摘作业提供了高效、可靠的解决
方案。
产品用途及使用范围
产品用途
机械手番茄采摘车主要用于植物工厂及其他室内环境中的番茄自动化采摘。其高
效精准的采摘能力,使得该产品成为番茄种植户的得力助手。具体来说,该机器
人能够准确检测出番茄的成熟度及其空间坐标,并自主移动到目标位置,通过机
械臂和机械手对成熟番茄进行逐个采摘,再放入自带的果篮中并送到指定位置。
此外,它还具有越过障碍物的能力,如餐桌上的玻璃护栏,能够将采摘后的樱桃
番茄精准投放到餐桌上的果盘里。
使用范围
1. 智慧农业:机械手番茄采摘车是智慧农业的标志性产品,广泛应用于植物工厂、温
室大棚等室内种植环境,实现番茄的自动化采摘。
2. 果蔬采摘:除番茄外,该产品还支持二次技术开发,可用于采摘其他果蔬品种,如
草莓、黄瓜等,满足不同种植户的多样化需求。
3. 科研与教学:在农业科研领域,机械手番茄采摘车可作为研究工具,用于探索果蔬
采摘的新方法和技术;同时,它也可作为教学工具,帮助学生了解现代农业装备的
工作原理和操作技巧。
4. 农业生产:在农业生产中,机械手番茄采摘车能够大幅提高采摘效率,减少人工成
本,提升农产品的市场竞争力。特别是在番茄采摘季节,该产品能够确保采摘工作
的顺利进行,避免因人力不足而导致的采摘延误。
机械手番茄采摘车凭借其高效、精准、智能的特点,正在逐渐改变传统的农业生
产方式,为智慧农业的发展注入了新的活力。
装置工作流程
1. 路径规划与自主行驶:
采摘车根据导航系统事先规划好的路径自主行驶,确保能够高效覆盖整个番茄种植
区域。
2.视觉识别与定位:
安装在机械臂上的双目立体视觉系统开始工作,利用成熟番茄与背景颜色特征的差
异信息,通过图像分割技术识别作业区域内是否有待采摘的成熟番茄。
当视觉系统检测到采摘对象时,采摘车停止前进,进一步对番茄进行精确定位,最
终获取成熟番茄准确的空间位置。
3.机械臂引导与采摘: 机械臂根据视觉系统提供的定位信息,引导末端执行器到达目标点。
末端执行器采用无接触式设计,通过剪断果梗而非直接抓取果实,避免对番茄表皮
造成损伤。
采摘成功后,果实被放入收获篮中,机械臂复位,准备采摘下一个目标点。
4.循环作业与结束:
采摘车在完成当前区域内的采摘任务后,继续前进至下一个区域,继续扫描并采摘
成熟番茄。
当到达预设的路径终点时,整个采摘过程结束。
装置创新设计
1. 双目立体视觉系统:
通过双目相机获取左右图像,生成视差图,利用三角测量法计算出番茄果实的三维
空间坐标,实现精准定位。
适应不同光照条件,提高识别精度和鲁棒性。
2.模块化设计与集成:
装置采用模块化设计,将视觉检测、机械臂控制、执行器控制等模块集成在一起,
便于后续维护与升级。 模块化设计还提高了装置的灵活性和适应性,能够适用于不同规模和类型的番茄种
植园。
3.智能控制算法:
集成基于深度学习的检测算法与路径规划算法,实现采摘车的自动导航与采摘任务
的高效执行。
通过传感器实时获取果实与障碍物的位置信息,动态调整机械臂的路径,确保采摘
过程的顺利进行。
4.柔性末端执行器:
利用算法精准的采摘番茄,避免对果实造成损伤。
配备传感器和摄像头,实现实时位置调整和精准采摘。
综上所述,机械手番茄采摘车装置通过采用先进的视觉识别技术、柔性采摘方式、
模块化设计以及智能控制算法等创新设计,实现了高效、精准、无损的番茄采摘
作业,为农业现代化发展提供了有力支持。
产品关键技术设计
1. 视觉识别与定位技术
双目立体视觉系统:双目立体视觉系统能够获取更丰富的空间信息,提高番茄定位
的精度与准确性。在采摘过程中,系统会根据定位信息引导机械臂到达目标点,确
保采摘的精准性。
2.运动控制与导航技术
自主导航:采摘车采用无轨式底盘,具备全向、大范围自主移动能力。通过结合视
觉、激光、磁导航及 SLAM 算法等多种传感器技术,实现精准定位与避障功能。
路径规划:根据事先规划好的路径,采摘车能够自主行驶至目标区域进行采摘作业。
同时,系统会根据实际情况进行路径调整,以应对复杂多变的农业环境。
综上所述,机械手番茄采摘车的这些技术的综合应用,使得采摘车能够高效、精
准地完成番茄采摘作业,为现代农业的智能化发展提供了有力支持。





