
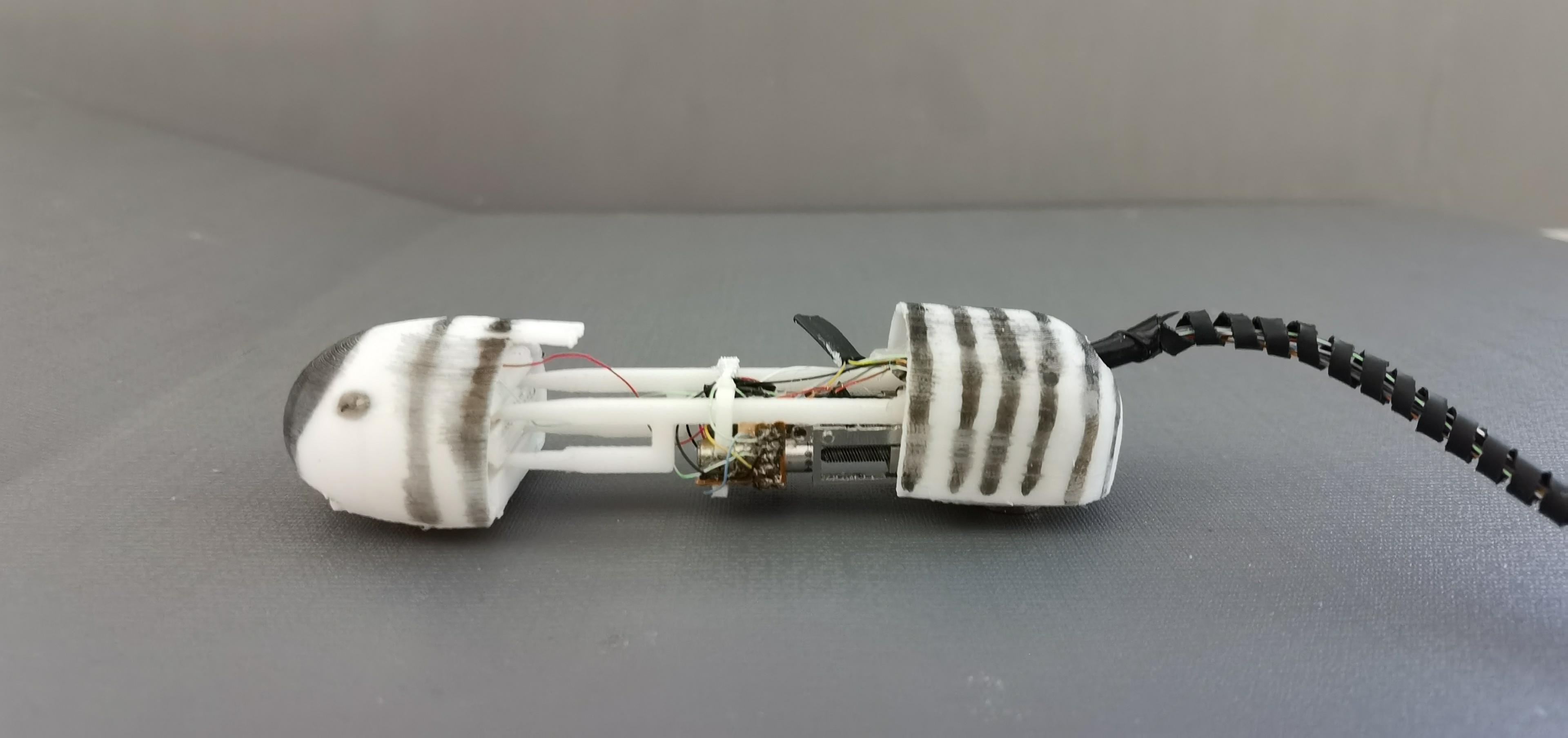
作品名称:缝隙里的“精灵”——电磁驱动式仿生机械蠕虫
学校名称:山西机电职业技术学院
参赛队伍:风驰电掣
队伍编号:202624
参赛学生:荆隆 张文龙 宋治鑫
指导老师:王望
投票日期:2024年10月08日 00:00->2024年12月05日 15:00
请在微信端进行投票。点此扫描二维码。


