
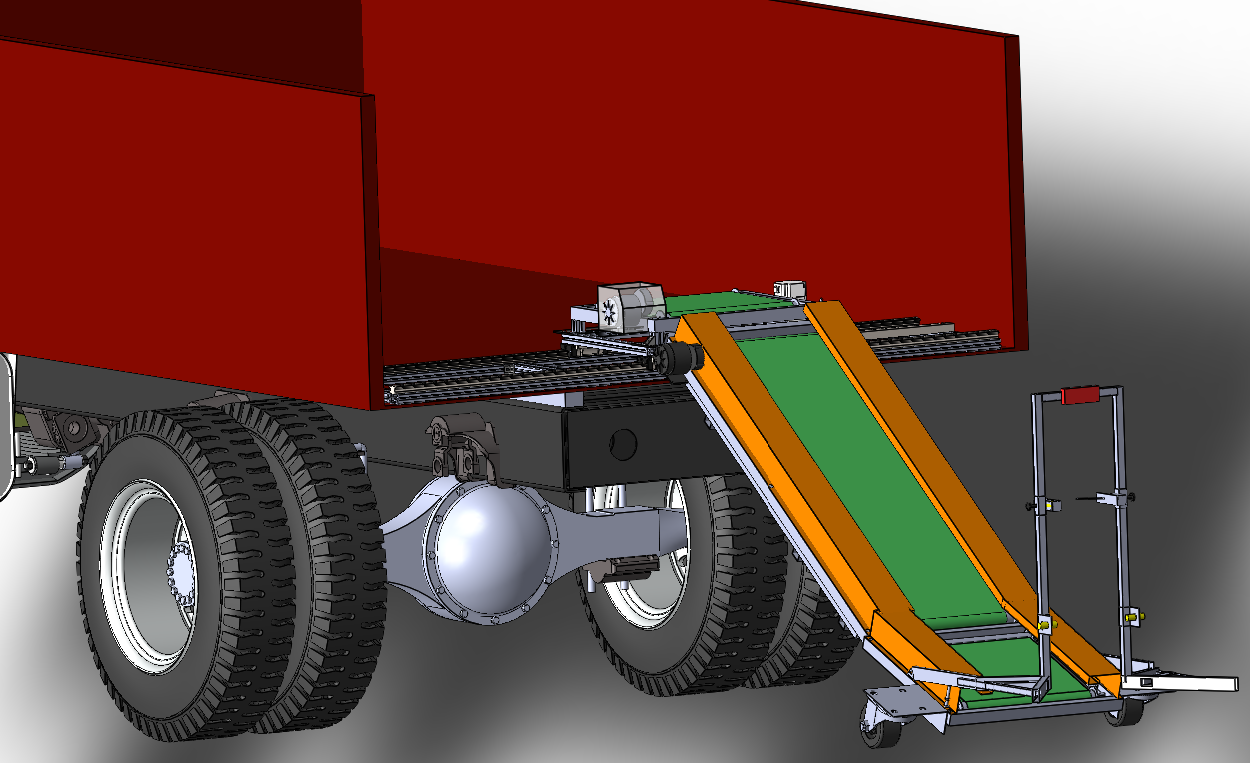
作品名称:锥行无忧—便携式路锥机器人
学校名称:兰州工业学院
参赛队伍:劳动最光荣
队伍编号:201787
参赛学生:宋东升 孟沛丰 王雨欣
指导老师:马鸿宇 陈普银
投票日期:2024年10月08日 00:00->2024年12月05日 15:00
请在微信端进行投票。点此扫描二维码。


