第一章 设计目的
1.1
目前,我国处理垃圾的很多环节还是使用人工筛检的方式,进行垃圾分类与后续处理。并且,仅仅依靠人力对垃圾进行分拣,一般只能够对非常小的一部分可回收垃圾以及有害垃圾进行拣出,而大部分垃圾还是没有被正确分类并正确处理的。在此背景下,本次设计的创新如下:
(1)自动避障功能:利用避障模块实现小车在工作中遇到的障碍,避免小车误碰障碍物遭到损坏,同时提高了小车运行过程的稳定性。
(2)垃圾分类功能:基于二哈识图模块对不同垃圾进行分类训练,利用该功能的实现了对来及分类的智能化处理。
(3)垃圾分拣功能:利用 OPENMV 模块对垃圾进行定位,由主控通过逆运动学算法求解各个机械臂关节转动角度,并驱动各个机械臂转动对应的角度,对垃圾进行抓取,实现了对垃圾处理工作人员的保护,也大大节省了劳动力。
(4)远程遥控功能:该小车不仅能实现自动寻迹和垃圾分拣,还可切换至手动模式,利用遥控装置实现对小车的控制,该功能可以在极端情况下利用人工控制的方法实现对垃圾分拣。
1.2设计目标
1. 提高垃圾分类的准确性和效率,减少人为错误。
2. 降低垃圾分类的劳动强度,节省人力资源。
3. 实现对不同类型垃圾的有效处理和回收利用。
第二章 工作原理
2.1原理论证
本次设计的智能垃圾分类机器人集智能识别,智能定位,智能抓取和智能语音播报于一身。硬件方面利用 OPENMV 模块对垃圾进行定位,由主控通过逆运动学算法求解各个机械臂关节转动角度,并驱动各个机械臂转动对应的角度,对垃圾进行抓取,利用二哈识图模块对不同垃圾进行分类训练,并利用神经网络算法对垃圾进行识别。主控根据识别的结果,驱动语音模块播报,打开对应的垃圾桶,让机械臂将垃圾准确放在对应的垃圾桶中。主控驱动小车底盘,让小车能够按照特定路线进行循迹行走。
2.2 设计流程
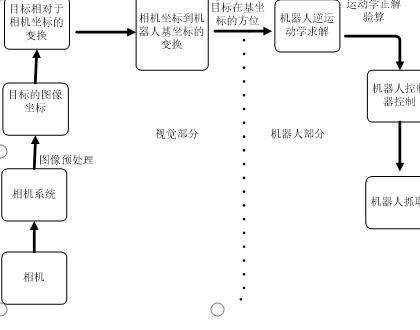
图 2-1 流程图
2.3主要功能
1. 自动识别:
• 配备先进的图像识别技术和传感器,能够快速准确地识别各种垃圾的类型,如可回收物、有害垃圾、厨余垃圾和其他垃圾。
• 对形状不规则、颜色复杂的垃圾也能进行有效识别。
2. 分类收集:
• 根据识别结果,将垃圾自动分类投入相应的收集箱中。
• 收集箱采用密封设计,防止异味散发和垃圾泄漏。
3. 智能导航:
• 具备自主导航功能,能够在不同的环境中自由移动,如小区、街道、公园等。
• 可以避开障碍物,规划最优路径,提高工作效率。
4. 数据传输:
• 实时将垃圾分类数据上传至云端服务器,方便管理人员进行统计和分析。
• 为垃圾分类决策提供数据支持。
第三章 产品构造
3.1 机械臂结构
机械臂作为一种连杆机构,要对其做一个运动学的的研究,一般会引进相关的模型,经典的模型为DH模型。该模型的引入大大降低了我们研究空间连杆机构的运动的难度。要实现机械臂的抓取工作,在这里面涉及的研究对象运动学逆解,以及运动学正解。利用 D- H表示法,给机械臂建立该模型,为下一步对它的运动学的推理做铺垫。当机械臂的关节数不多时,建立D-H模型反而比较麻烦,不过可以采用几何法求解。有了机械臂的运动学基础,为手眼标定和机械臂对物体的抓取奠定理论基础和相关的理论支持。
机械臂的尺寸图如图3-1所示。
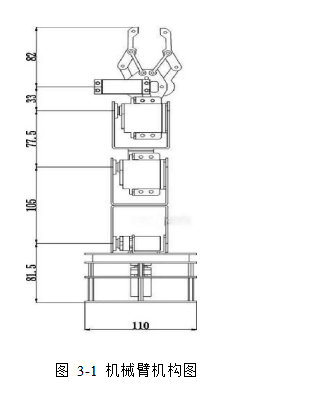
图 3-1 机械臂机构图
3.1.1 机械臂坐标变换
机械臂要进行相应的坐标变换,那坐标轴怎么确定呢,比较常用的方法是建立右手坐标系,如下图3-2所示为建立右手坐标系的方法以及坐标系旋转正方向的确定,X、Y、Z轴的的正方向分别为大拇指,食指,中指所朝向。
1.向量绕轴旋转
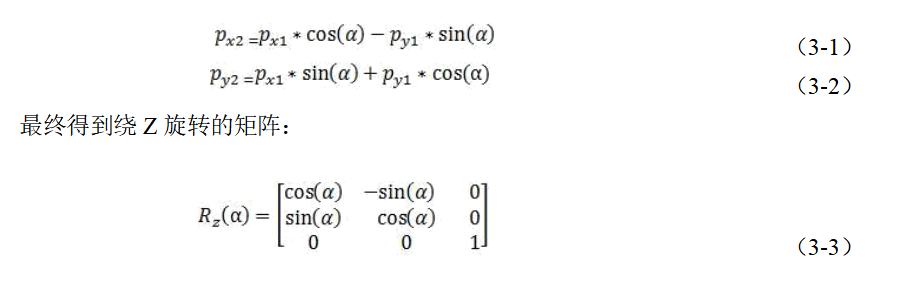
如下图3-4和图3-5所示,根据右手法则,绕Z轴旋转,旋转角度为��度。。

图3-3 绕Z轴旋转 图3-4 绕Z旋转
 角度
角度
由上图可以得出以下推导式:
2. 向量的平移
平移后的向量为初始向量与平移向量相加:
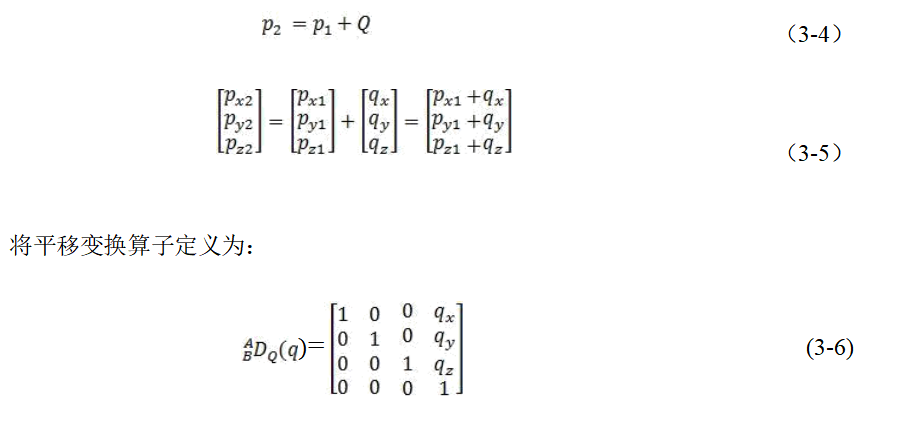


Python语言生成一个平移变换算子如图2-6所示:
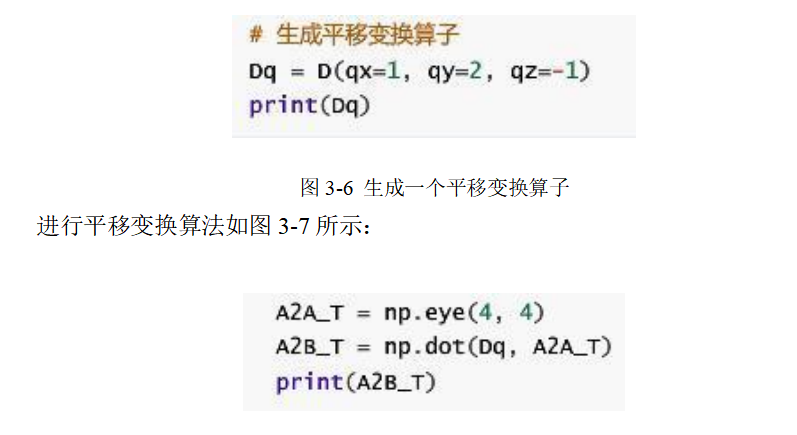
图3-7 进行平移变换
进行变换可视化算法如图3-8,可视化结果如图3-9.
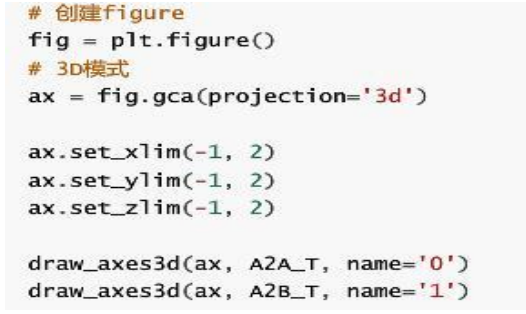
图3-8 变换可视化算法
如下图所示,向量 为以A坐标系为参考的向量
为以A坐标系为参考的向量 。
。
 (3-7)
(3-7)

图3-10 三维坐标下的平移和旋转
3.1.2 机械臂的DH模型
1.DH模型基本思想
给每一个关节指定一个坐标系,比如从机械臂的基坐标开始,到第一个关节,以此类推,直到到达末端执行器关节停止,从一个坐标系到另外一个坐标系的转换有一个平移和旋转矩阵,有了这些关节的关系,再通过计算,就可以得到各个关节之间的关系。
2. 机械臂DH模型的建立
两活动关节间的连杆作为X轴,Z轴为旋转关节的旋转轴。然后利用上一节的空间坐标轴建立的方法,也就是我们常用的方法:右手法则,最后建立关节的坐标轴。
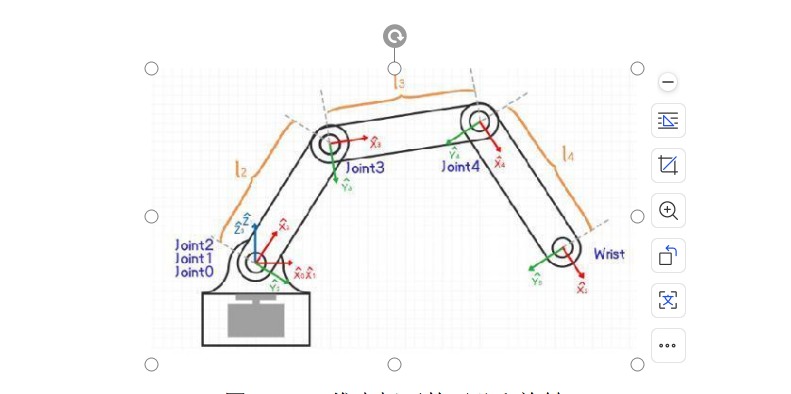
图3-11 三维坐标下的平移和旋转
DH参数表如下表所示:
表3-1 DH 参数表
|
关节编号( ) )
|

|

|

|

|
|
1
|
0
|
0
|

|
0
|
|
2
|
-90
|
0
|

|
0
|
|
3
|
0
|
L2
|

|
0
|
|
4
|
0
|
L3
|

|
0
|
|
5
|
0
|
L4
|
0
|
0
|
3.1.3 正向运动学求解
根据DH表以及上面平移旋转的推导式依次推导出 的变换。
的变换。
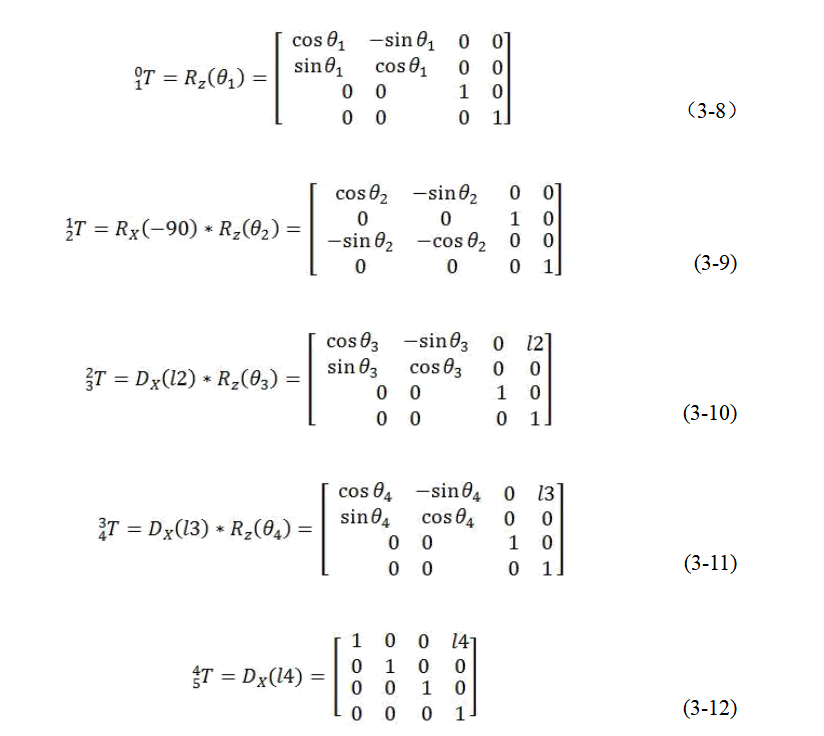
(3-14)
所
3.1.4 逆向运动学
1.机械臂连杆长度与关节角度约束
运动学的逆解在研究整个机器人系统起着至关重要的作用,它可以让我们对这个机械臂系统有了更加深层次的理解。为了简化模型,可以将三维运放在二维平面分析, ,
, ,
, 为各个关节的角度,根据正解我们可以知道,里面有大量的矩阵运算,如果用单片机,需要耗费大量的时间,使得单片机不能满足实时性的控制需求,所以接下来用几何法分析,表2-2和表2-3是机械臂的一些参数信息。
为各个关节的角度,根据正解我们可以知道,里面有大量的矩阵运算,如果用单片机,需要耗费大量的时间,使得单片机不能满足实时性的控制需求,所以接下来用几何法分析,表2-2和表2-3是机械臂的一些参数信息。
表3-2 机械臂连杆长度
|
连杆编号
|
长度(单位:米)
|
|
L2
|
0.105
|
|
L3
|
0.0775
|
|
L4
|
0.033
|
表3-3 舵机的约束条件
|
关节
|
最小值
|
最大值
|
舵机角度范围
|
|

|

|

|
180度
|
|

|

找人才
千校人才小程序

找工作
万企岗位小程序
如果您有其它需求请致电:
010-66083178
请您耐心等待,我们将于三个工作日内与您联系。
您也可直接致电:010-66083178、
18601211597(微信同号)
或发邮箱:web@uec.org.cn
|















