
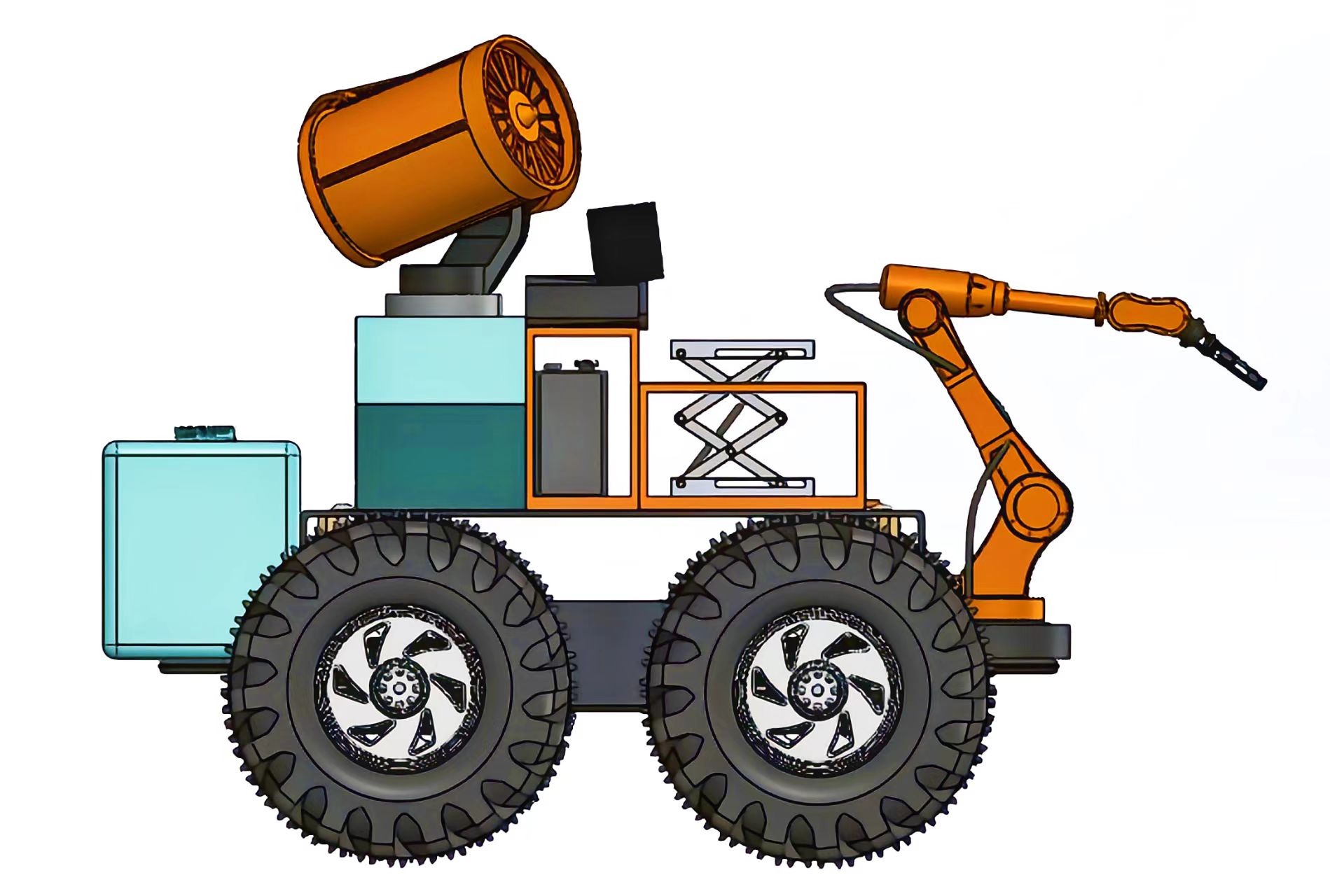
作品名称:智能农业——喷药采摘运输模块化作业车
学校名称:兰州工业学院
参赛队伍:探索者
队伍编号:201131
参赛学生:秦健坤 李向宇 马振兴
指导老师:张军平
投票日期:2024年10月08日 00:00->2024年12月05日 15:00
请在微信端进行投票。点此扫描二维码。


