一种全自动化的萝卜播种机
一、项目背景和展望
1.1 项目背景
我国是农业生产大国,人口基数和对农产品的需求量都极大,且随着农业生产规模的扩大,传统农耕方式面临诸多挑战,如劳动力短缺、劳动强度高和生产效率低等。自2012年以来,在政策的引导下,越来越多的地区开始引进和使用自动化播种机,以提高种植效率和质量,而萝常见的蔬菜,其种植面积广,市场需求大,因此萝卜播种机的市场需求也十分旺盛。我们小组所设计的一种全自动化的萝卜播种机,采用了可续航的锂电池作为动力源,从而带动齿轮转动,进而带动一系列机构运动。采用了镇压机构,减少了农药和化肥的使用,同时也减少了环境的污染,且采用特殊的播种机构,减少了资源的浪费具有一定的速度和精准度,能减少播种时间和提升作物的整齐度和一致性。
1.2 项目展望
(1)市场需求增长:萝卜等蔬菜作物的种植领域,播种机的应用将更加广泛。
(2)技术创新推动:随着科技的不断进步和创新,播种机行业将面临更多的发展机遇。新型材料、先进制造工艺以及智能化技术的应用将推动播种机技术的不断升级和优化,提高设备的性能和效率。
(3)农业机械化推动:播种机作为农业机械化的重要组成部分,其发展前景十分广阔。随着农业机械化程度的不断提高,播种机将在农业生产中发挥更加重要的作用。
综上所述,萝卜播种机的研究趋势与发展前景十分可观。同时,播种机行业也需要不断关注市场需求和技术发展趋势,加强技术研发和创新,提高产品质量和性能,以更好地满足农业生产的需要。
二、萝卜播种效率研究
萝卜作为一种广泛种植的蔬菜,其产量和质量受到多种因素的影响,播种效率就是其因素中的一个,播种效率的高低直接影响到萝卜的生长周期、产量以及农民的经济效益。我们小组对萝卜播种效率研究采用对照实验的方法,在实验区域内设置了对照组和实验组,确保除了播种方式外的其他条件(如土壤条件、施肥方式等)尽量一致,对比传统播种方法和现代化机械播种方法的效率,本研究选择了以下几个关键指标:播种速度、播种均匀度、种子破损率以及出苗率,这些指标能够全面反映播种效率的高低。
实验结果显示,现代化机械播种方法的播种速度明显快于传统播种方法。机械播种能够实现连续、稳定的播种作业,大大提高了播种效率;机械播种能够精确控制种子的间距和深度,使得种子分布更加均匀,有利于萝卜的生长和产量提高;机械播种对种子的轻柔处理,使机械播种的种子破损率较低。基于以上结论,我们小组建议农民在种植萝卜时优先考虑采用现代化机械播种方法。同时,未来的研究可以进一步探索如何优化机械播种设备的设计和使用,以进一步提高播种效率和种植效果。
三、核心技术
3.1 同步带的设计
首先确认同步带传动的设计功率Pd,带的型号和节距,小带轮齿数Z1、Z2,再确定带轮的节圆直径d1,d2,验证带速V并确定同步带的节线长度Ln,最后计算传动中心距a和同步带的所需宽度b,最后我们小组设计的同步带参数如图3.1所示。
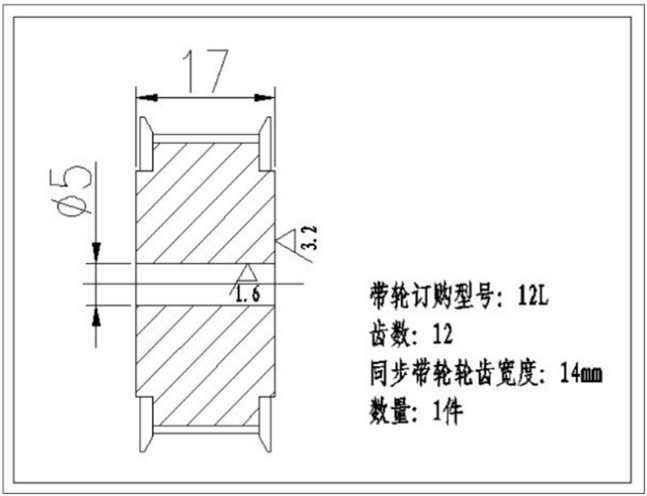 图3.1 同步带参数图
图3.1 同步带参数图
3.2 旋耕机构设计
旋耕机构设计如下图3.2所示,我们预采用3D打印的方式做出该旋耕刀轴。旋耕是农业播种前的准备工作,旋耕刀片对泥土铣切。旋耕机构能够一次性实现碎土充分、作业域平坦、土肥掺和均匀,对节约农时、减轻劳力、缓解劳动强度非常有利。其主要通过支撑架上的电动机带动万向联轴器,万向联轴器将电动机带来的动力传导到传动直轴,通过传动直轴的转动来带动同步带轮及同步带并连接至耕刀轴,从而最终耕刀轴带动耕刀正常运转。
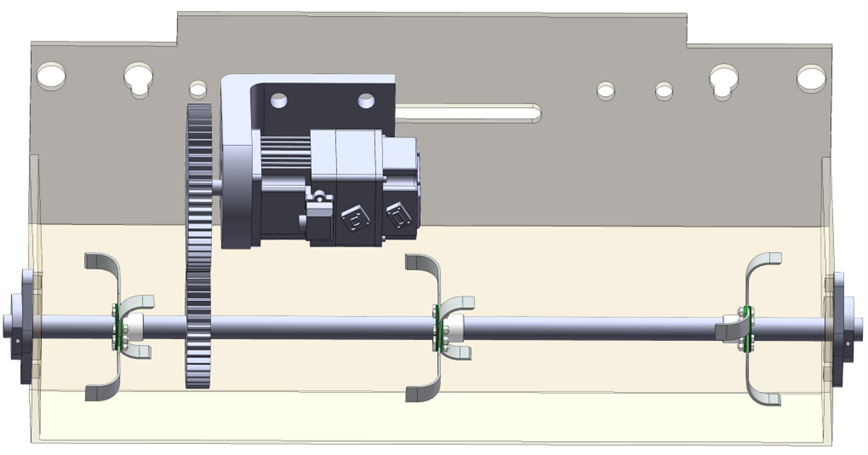
图3.2 旋耕机构装配图
3.3 开沟机构设计
开沟机构设计如图3.3所示,本设计的开沟机构采用的是丝杠螺旋型开沟器,开沟器是一种全自动化的萝卜播种机上重要的部件之一,我们采用3D打印的方式做出该开沟机构。开沟机构的传动系统我采用的小型丝杠螺旋副,动力源采用电机,我们所设计的开沟器满足如下几个条件:开沟直、深浅一致,幅宽合适,沟底平整,有一定的自动覆土功能;有良好的入土性能,不壅土、不缠草、不堵塞、阻力小、工作可靠;使种子全部落如沟底,行内种子分布幅度、均匀度应符合农业技术要求。
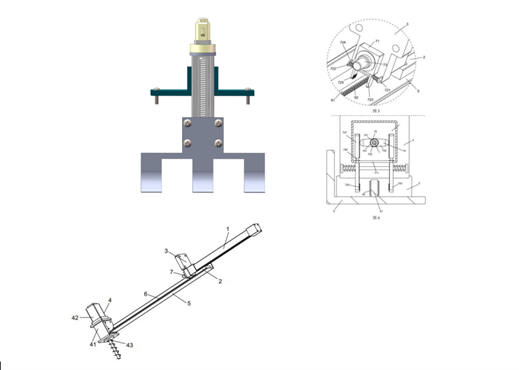
图3.3 开沟机构装配图
3.4 排种机构设计
排种机构设计如图3.4所示,本设计的排种机构采用的是孔轮式排种机构,它的性能参数直接影响到一体化萝卜播种机的播种质量,播种效率等重要的技术指标。其工作时播种电机输出的转矩通过小带轮送达大带轮,使大带轮所在轴转动,带动其上的小齿轮,小齿啮合齿轮,使同根轴上的排种轮旋转进行排种流程。排种轮位于种箱的底部并且间隙小于萝卜种子的最小直径,排种轮上有一小孔,孔的直径设计为允许适量萝卜种子通过的大小,萝卜种子进入排种孔之后随着排种轮转动,到达下面投种口时萝卜种子会因为重力作用而脱离排种轮落入种沟完成排种。
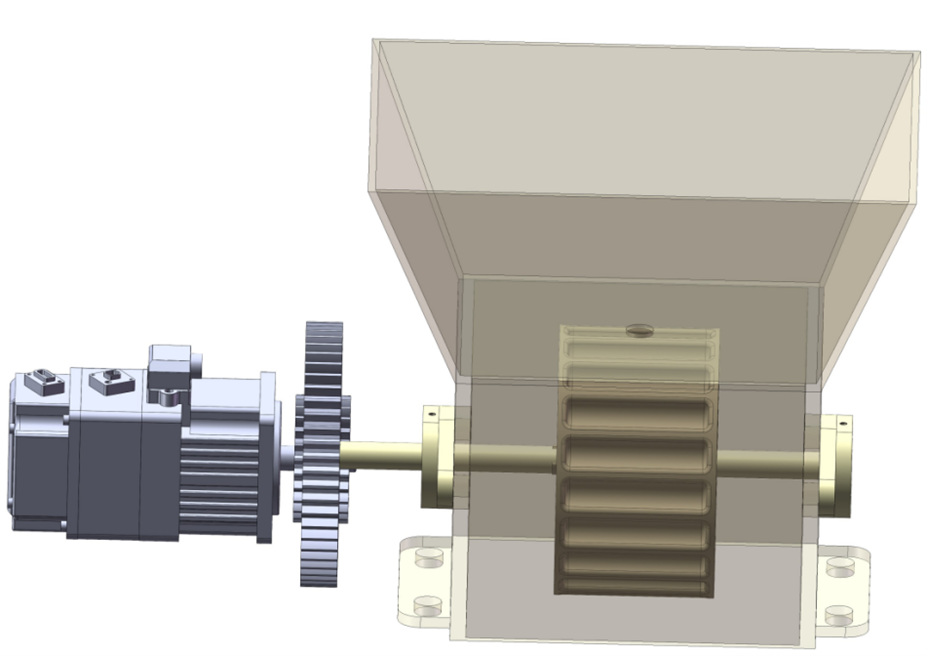
图3.4 排种机构装配图
3.5 镇压机构设计
镇压机构设计如图3.5所示,镇压机构由螺钉、挡圈、垄侧面覆土板、镇压轮轴、轴承、孔用弹性挡圈、键、滑动套、悬挂轴、挡圈、邢销、驻导向板、垄覆土板间隔套、中间镇压轮、中间镇压轮拨叉、气缸(油缸)联接法兰、气缸(油缸)、探头、垄侧面覆土板转臂、转臂固定板、螺栓、螺母、垫圈、机架、导柱、弹簧、垫圈、调整螺母、破土侧转臂、镇压轮等组成。
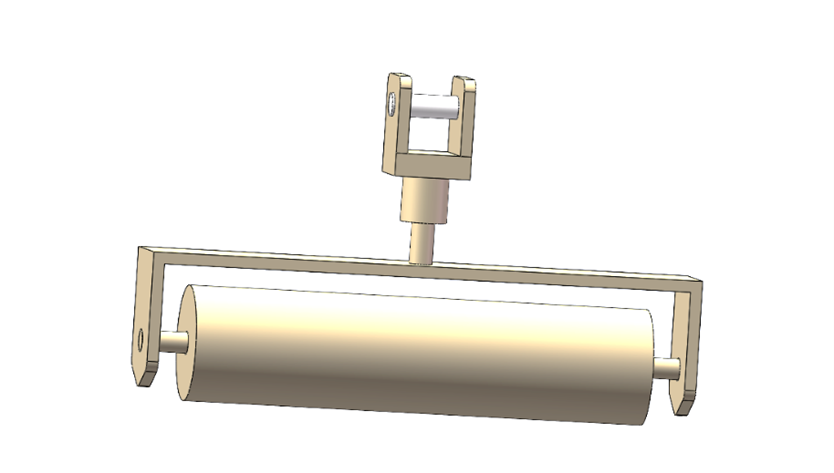
图3.5 镇压机构装配图
3.6 行走机构设计
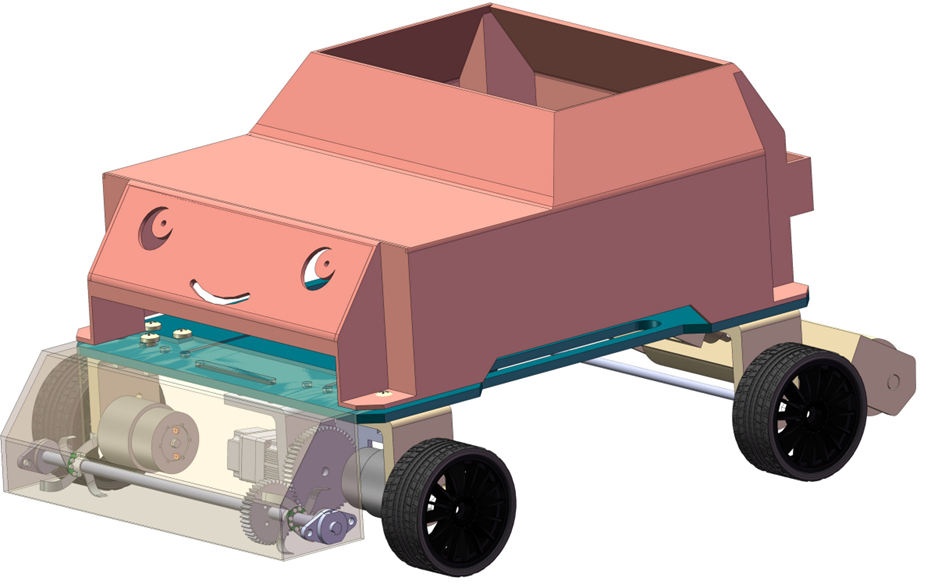
行走机构设计如图3.6所示,我们所设计的行走机构采用的是四轮驱动。车轮采用越野轮胎,轮胎上面的越野花纹沟槽宽而深,花纹接地面积较小,抓地力较大,在土地上工作时有较强的脱困能力。通过手柄控制电机伺服驱动器发出脉冲信号控制电动机的运转,使电动机按照工作指令进行运行从而驱动整车行进。为行走提供主要动能的是12V锂电池组,可通过增加锂电池的数量来解决相应的续航问题,锂电池整体结构相对狭小、重量轻,可以保证播种机的顺利运行。
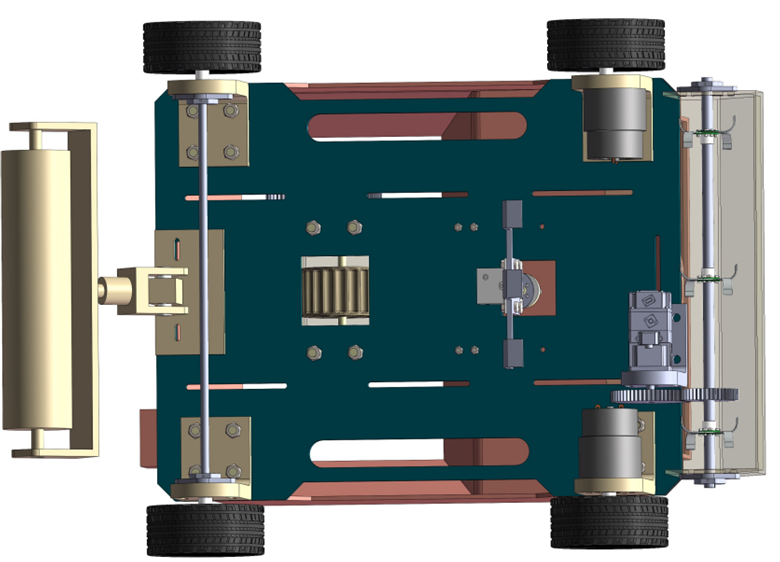
图3.6 行走机构装配图
3.7 智能控制系统
如图3.7所示,底盘驱动电机驱动选用的是STM32控制板,使用配套手柄进行控制;如图3.8所示,丝杆螺旋副采用uln2003驱动板进行升降控制开沟机构;如图3.9所示,使用51单片机的最小控制系统来对镇压轮进行起落控制。
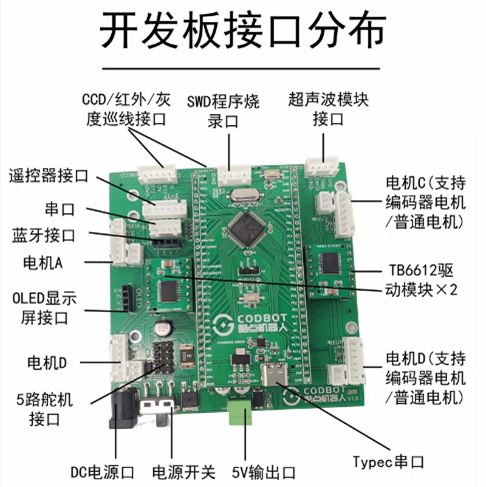
图3.7 STM32控制面板的接口分布图

图3.8 丝杆(带uln2003驱动板)示意图
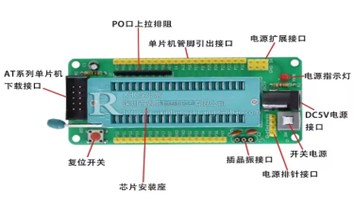
图3.9 51单片机最小系统示意图
四、研究基础
 图4.1 一种一体化播种装置专利
图4.1 一种一体化播种装置专利
 图4.2 一种开沟装置专利
图4.2 一种开沟装置专利
 图4.3 一种枯黄蔬菜摘除设备专利
图4.3 一种枯黄蔬菜摘除设备专利
图4.4 一种抓取装置专利
图4.5 一种智能栽种机器人专利
五、实物模型展示

图5.1 产品总装实物图
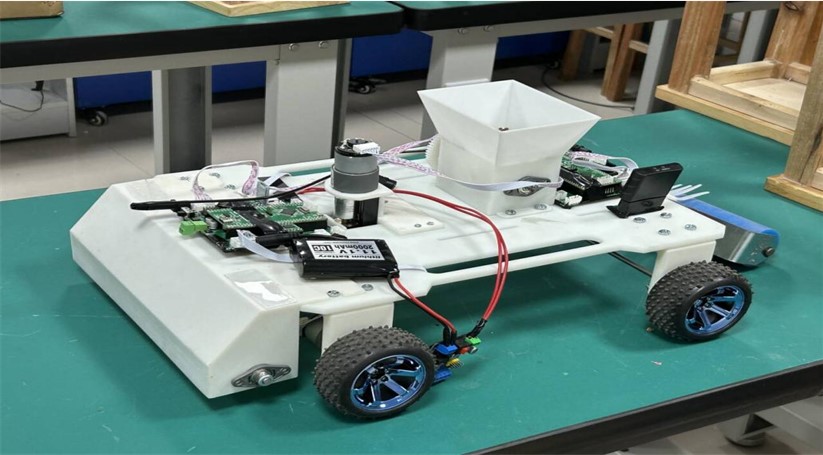
图5.2 产品内部细节展示图
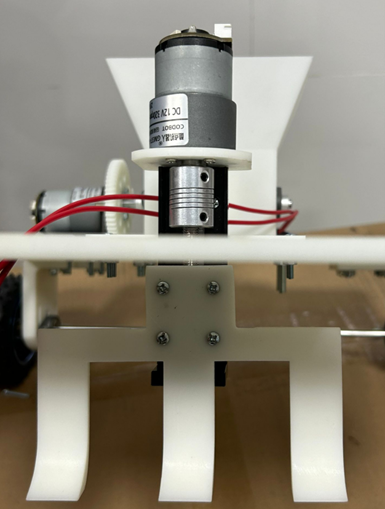
图5.3 产品实物行走机构展示图












 图4.1
图4.1








