1.1 设计目的
20世纪60年代,随着全球石油产量的激增和海上运输的飞速发展,石油泄漏事故成为了一个日益突出的环境问题。1967年的托里坎油污染事件,以及1978年的阿莫科塞德罗号油轮事故,都暴露了海上石油运输的安全隐患,引起了国际社会对海洋污染问题的广泛关注。
当今社会经济的不断发展和人类对石油需求的迅猛增长,促进了海上石油开采事业迅速崛起,海上溢油事故也频频发生。随着海上运输的迅猛发展,全球大型油轮的数量和级别都在不断增加,这使得海上溢油的潜在威胁日益增强。大量的石油会覆盖在海面上,形成油膜,对海洋生态系统造成严重破坏。溢油对海洋造成的持久的污染不仅损害海洋环境和资源,致使大量水中生物窒息而死,还会影响局部水文气象条件,降低海洋的自净能力,造成自然环境的巨大灾难和生态平衡的严重破坏,导致严重的经济损失,同时也危害人体健康,如图1,图2.

图1溢油区域

图2溢油区域
由于近年来海上开采及船舶溢油事故频繁发生,给海洋生态环境造成了严重的危害。为了缓解这一问题设计了刮油式海面清洁守护者,本产品主要功能是在含浮油的水中通过刮板分离出浮油,以提高收集浮油的效率,并对浮油进行回收。此产品既能适应海上恶劣的气候条件,减少人工作业的时间,还能利用太阳能续航工作时间,这样的浮油自动收集装置对于海上溢油回收以及海洋环境的保护都具有极其重要的意义。
目前我国对于海上浮油的收集主要沿用比较传统的方式。再加上全球化的加剧,海上运油通道越来越繁忙同时海上溢油的情况也越来越频繁,因此对于漏油收集装置的研发也到了比较急迫的状况,此类装置的市场需求也将更加广阔,若研制成功对于生态环境将产生巨大的正面意义,同时也将产生不小的经济意义。
起初我国利用吸油毛毡人工吸取海上浮油,不仅效率低,成本高,人力资源浪费严重,同时由于海上环境恶劣,对于操作人员也有一定的危险。就现在而言,常使用围油栏用于阻止溢油范围的进一步扩大,防止溢油流向敏感的海岸线地带,但不能从根本上解决此问题。有时也会通过可控燃烧来清除水中的溢油,但这会产生其他污染物,不利于环境的保护问题;或者是向水中投入化学分散剂,以此加速油分子的分解,以达到除油的目的。
所以,需要一种同时能防止生态灾难发生,还可避免石油浪费的清理方法。针对海上运油线和海底油田,河口、港湾及近海水域浮油污染问题,由此设计出该产品。
本装置设计的目的在于克服现有技术的浮油收集装置的浮油收集效率较低,且不适用于海上的大面积浮油收集的缺陷,提供一种浮油收集效率较高,并适用于海上的大面积浮油收集的方法。可用于存在石油泄漏的大面积水域,进行油水收集以及分离,双重过滤提高了油质的纯度,水中收油部分可根据油层厚薄对集油器进行调节,无论水面上油层厚薄,本机均可回收,并且操作简单,维修方便,智能化程度较高,针对处理海上溢油措施有了新的提高。此外,本机器简洁灵活可作为个体或群体使用,具有很强的实用性。远程遥控系统,精准的定位目标位置,方便快捷,收集浮油速率可调。通过两个液位开关和电磁阀,精度较高且价格便宜。使用安全,能长期正常工作,实用性强,适合水上溢油回收和大型油水分离,本装置的还具有较高的推广价值,可广泛应用于未来溢油现象严重的水域。
1.2研究方向
原油泄露一向以其突发性和不可预见性而臭名昭著,它会给海洋环境和海洋生物带来严重的破坏,为了维护海上生态坏境,有必要设计出一种省时、省力、收油效率高,除油率可观的机械产品, 刮油式海面清洁守护者的设计特点是从思维到方案,方案到图纸到具体产品的演化过程。从产品规划、功能需求、原理方案设计,到较为具体的结构方案设计、总体设计组装等。本装置在整个设计过程中不断完善产品的信息,直到整个产品达到预期的功能与期望。
经过网上查阅资料了解到目前存在的除油方式,总结出其缺点如下:
(1)浪费人力,费时费力。
(2)对工作人员的人身安全造成威胁。
(3)处理溢油效果不佳。
(4)浪费资源。
(5)对海底植物及动物的危害极大。
需要一种同时能防止生态灾难发生,还可避免石油浪费的清理方法。海上石油污染主要发生在河口、海湾、海上运油线和海底油田周围。针对这些地方研究出刮油式海面清洁守护者来进行海上浮油的回收。经过分析,设计的重点应该为:
(1)对海洋生态环境不会造成二次污染。
(2)控制便捷、操作简单,维修方便。
(3)除油率高,收油效率高,耗电低,效果稳定,使用安全,能长期正常工作。
(4)可用于存在石油泄漏的大面积水域。
(5)简洁灵活可作为个体或群体使用。
(6)节约人力资源。
2 工作原理和功能特点
2.1工作原理
刮油式海面清洁守护者的工作原理主要概括为:
(1)在传送系统中,利用传送带的倾斜度(60°左右)可以达到收集不同高度油层,并且其采用刮刀设计,利用其角度差(40°左右)达到聚集浮油的作用。传送带采用橡胶材质,运用其耐磨的特点,将油传送上去,并且动力充足,极大的提高了收集效率。
如图2.1所示:

图 2.1
(2)其动力装置中,主要可以概括为:动力高,转速高,耐腐蚀三点。由于装置动力高,高效的保证了装置的动力强度,并通过太阳能供电系统保证其续航能力,并且采用三相无刷电机,起到绝缘耐腐蚀的作用、这保证了装置的动力强度以及装置的稳定性与灵活性。
(3)在其封装机构中,巧妙的利用连杆机构的极限位置,弧形运动轨迹完成收集工作中的封装部分,并且在其末端有磁力盘,可以同连杆机构相互配合完成封装的一系列过程。
(4)在传送、收集过程中,本装置通过传送带将油传送上来后,经刮刀刮下的油到达导流槽,利用油自身重力作用到达桶中,达到收集作用。
2.2功能特点
该装置主要包括四个装置,如图2.2所示:
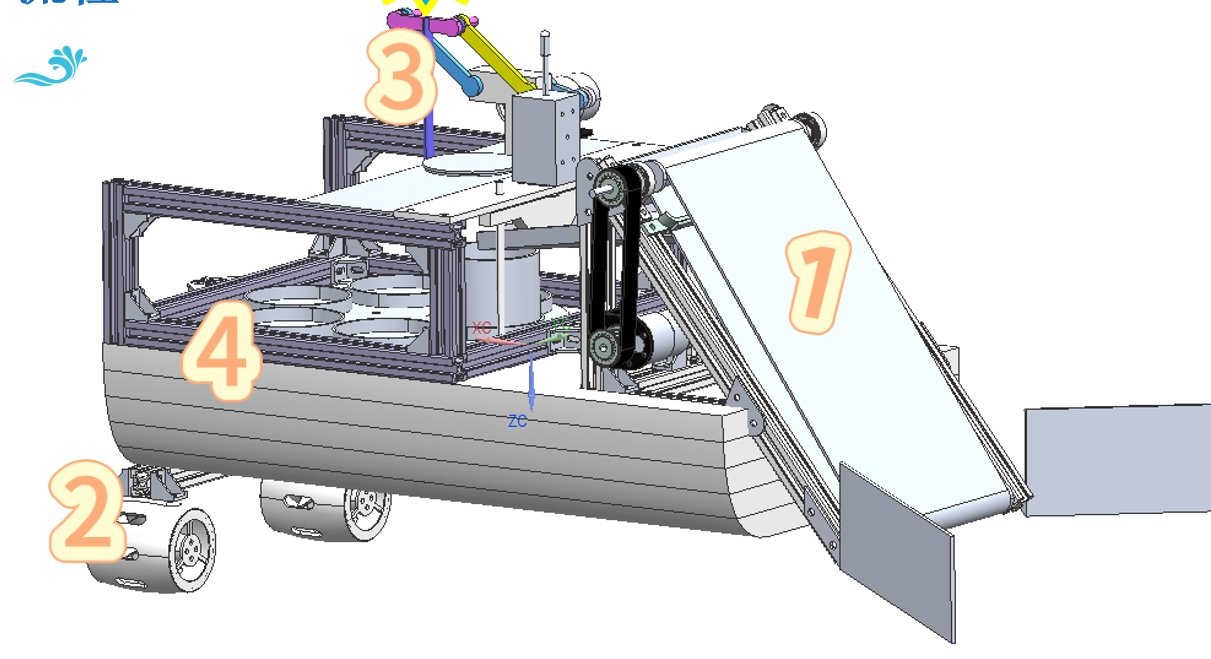
图 2.2 内部结构图
①传送装置
②动力装置
③自动封装装置
④工位旋转装置
其具体特点如下:
(1)传送装置:通过两端挡板将油汇聚到传送带附近,经传送带转动将油传送上去。如图2.3所示:

图 2.3 传送装置
(2)动力装置:由于装置动力高,有效的保证了装置的动力强度,其特点主要表现为:动力足,转速高,耐腐蚀,并且采用三相无刷电机,起到绝缘耐腐蚀的作用,如图2.4所示:



图 2.4 动力装置
(3)自动封装装置:该装置由电机带动四连杆机构运动,完成取,移,放,压一系列循环工作,在拾取末端放置电磁铁吸取铁盖子完成封盖。如图2.5所示:

图 2.5 自动封装装置
(3)工位旋转装置:该装置承担收集功能,采用六工位制,经刮刀刮下的油,通过导流槽进入桶中,达到储存作用。如图2.6所示:

图 2.6工位旋转装置
3 主要技术参数
3.1控制程序设计
电气原理图如图3.1。

图 3.1 电气原理图
刮油式海面清洁守护者的核心器件为 arduino控制板,这是一款起步比较早的、便捷灵活、方便上手的开源硬件产品,各种开源项目目前已经得到广泛的认可和大范围的应用。
arduino控制板程序如下:
#include <Servo.h>
Servo duoji1;//创建伺服器对象
Servo duoji2;//创建伺服器对象
int seroverdown = 9; //定义舵机信号线接口
int seroverup = 10; //定义舵机信号线接口
int psx = 1;//定义摇杆信号线接口
int psy = 2;//定义摇杆信号线接口
int valx;
int valy;
int jidianqi1 =3; //管脚3连接到继电器模块的信号脚
int a=0,b=0;
void setup()
{
Serial.begin(9600);
pinMode(psx, OUTPUT);
pinMode(psy, OUTPUT);
duoji1.attach(9);
duoji2.attach(10);
pinMode(jidianqi1, OUTPUT); //设置pinRelay脚为输出状态














