一、设计目的
随着我国经济的快速发展,人民物质生活水平的大幅度提高,公众的日常生活、生产中产生了各种大量的废弃物。这些来源复杂、种类繁多的各类垃圾严重破坏了社会人文景观和自然环境,我们以为此付出了惨痛的代价。值得注意的是,过去未被重视的一种水域环境污染——水上垃圾污染也是越来越严重。迅速的城市化和工业化进程、旅游业的发展、民众环保意识的淡薄,等等因素导致了这些废弃物的产生,使得江河、湖泊和港口,甚至近海的水面漂浮垃圾的污染日益严重,尤其是流经城镇生活区域的河流段。大量水面垃圾的污染得不到及时处理将会产生二次污染物,不仅破坏了生活水源,威胁到以这些水体作为生活用水的居民的身体健康,也影响了市容环境。
治理水上垃圾的方法:
可以在需要清理的地方安装两个排水网,防止垃圾污染更多的水资源;人工清理水面上的垃圾;严禁乱丢垃圾;加强人们对水资源保护方面的教育。
根据治理水上垃圾的这些方法可以看出,将水上垃圾从水中清理出来是主要方法,基于我国目前的水上垃圾污染的现状以及治理水上垃圾的主要方法,对水面漂浮垃圾的处理一般是透过人工打捞,而传统的打捞方式为人工站在小型船只上或者岸边,采用网兜和长柄夹采集方式进行水面垃圾的打捞作业,该方式不仅打捞效率和效果等方面均存在明显的缺陷,而且打捞人员也存在可能落水的危险。对于以上情况,我们团队研究设计了一个拥有水陆两栖的,节能减排的,带有视觉识别功能的“履带式两栖水上垃圾收集车”。
二、作品的主要结构及工作原理
1. 工作原理:
履带式两栖水上垃圾收集车总体结构分为机械结构部分及电气控制部分等两部分。机械结构部分主要由电动推杆、履带、气囊、传送带、螺旋桨、垃圾箱等结构组成。电气控制部分主要由太阳能板,直流减速电机,太阳能控制器,摄像头,Arduino Uno开发板,视觉识别模块,蓝牙模块等结构组成;作品整体规格:长:1290mm 宽:1142mm 高:1050mm
履带式两栖水上垃圾收集车工作时利用太阳能板进行发电,配备一个蓄电池储存电能;太阳能板与光线强度强的方向保持一致,大大提高太阳能的利用率、充分发挥组件的发电能力。
在履带式两栖水上垃圾收集车运行时,利用 Arduino Uno开发板上提前编译好的程序,控制履带式两栖水上垃圾收集车的运动路径及从陆地到水面,收集垃圾,返回陆地等动作的自动运行。当车子通过24V 60r/min直流减速电机带动履带从陆地运动到水面的相应位置后,螺旋桨开始转动进而车开始在水面上工作,与此同时电动推杆垂直做向上运动来调整传送带的斜度,在通过视觉识别模块来锁定垃圾的位置,再通过传送带的作用,垃圾就被传到了垃圾箱里,从而完成将水上垃圾回收进垃圾桶的一系列动作;垃圾收集完毕后,通过 Arduino Uno开发板的控制来完成车返回陆地的指令。
我们不仅通过 Arduino Uno开发板开始编译程序来控制履带式两栖水上垃圾收集车运动,还可以通过蓝牙模块随时进行远程的对车的操控。履带式两栖水上垃圾收集车还配有一个摄像头和一个视觉识别模块,分别负责观察四周环境和检测四周垃圾的位置的工作,在工作期间履带式两栖水上垃圾收集车前方遇到高于车壳高度的障碍物会自动停止工作。
2. 机械结构部分:
2.1电动推杆:
电动推杆(图2.1所示)是一种新型的电动执行机构,电动推杆主要由电机、推杆和控制装置等机构组成的一种新型直线执行机构,可以实现远距离控制、集中控制。电动推杆在一定范围行程内作往返运动,一般电动推杆标准行程在,100,150,200,250,300,350,400mm,特殊行程也可根据不同应用条件要求设计定做。
电动机经齿轮减速后,带动一对丝杆螺母。把电机的旋转运动变成直线运动,利用电动机正反转完成推杆动作。如通过各种杠杆、摇杆或连杆等机构可完成转动、摇动等复杂动作。通过改变杠杆力臂长度,可以增大或减小行程。齿轮传动形式:电机通过减速齿轮后带动安装于内管的小丝杆,带动与之连接一起的做轴向运行螺母,至所设定的行程时螺母触角压住限位开关断开电源,电机停止运动(反向与之相同)。
推杆参数:24V 行程450mm,速度10mm/s,扭矩900N

图2.1
2.2履带:
当电机的动力传递给驱动轮时,驱动轮顺时针拉动履带,从而在地面履带和地面履带之间产生相互作用。根据力的作用和反作用原理,轨道沿水平方向对地面施力,地面对轨道施力,从而使履带运动起来。履带与车壳相连接从而实现车在陆地上行走这一功能,且在地面上履带承载着车的全部重量。
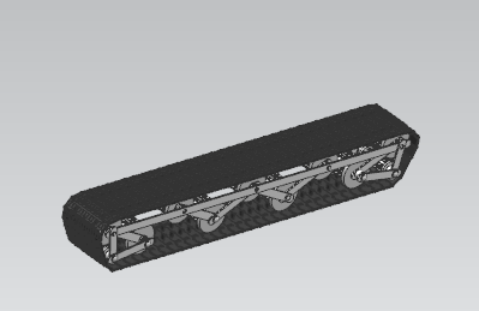
图2.2
2.3气囊
在一个密封的容器中充入气体之后得到的装置叫做气囊。气囊与车壳相连并放在两边,使车在水中受力均匀达到平衡状态,并且在水中承载着车的全部重量。
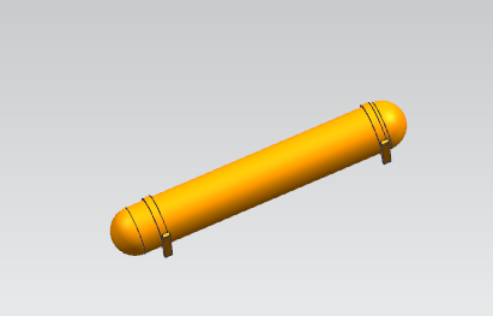
图2.3
2.4传送带
传输系统的运输货物的动力来自于电机,当电机启动后,会带动齿轮的运行,齿轮之间的啮合带动了链条做周期性的循环转动,因而达到了运输的效果。我们还在传送带的两边加了挡板目的是为了防止垃圾从传送带的两侧掉落,并且传送带上设有孔洞和传送棱,它们的作用分别是让水和垃圾分离和防止垃圾沿着传送带滚落。
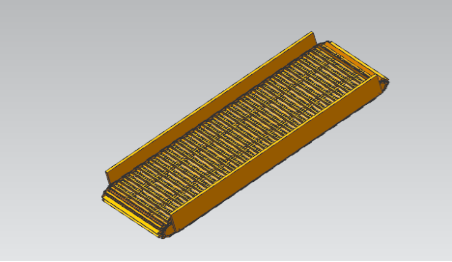
图2.4
2.5螺旋桨
螺旋桨是指靠桨叶在空气或水中旋转,将发动机转动功率转化为推进力的装置,可有两个或较多的叶与毂相连,叶的向后一面为螺旋面或近似于螺旋面的一种推进器。螺旋桨装配在车的两侧使车可以在水中运动,其中车在水上的转向就是通过一侧的螺旋桨停止旋转,另一侧的螺旋桨旋转来实现的。我们采用的是型号T60pro的螺旋桨。螺旋桨的规格:长:160宽:100高:147。

图2.5
2.6垃圾箱
垃圾箱是用来存储传送带在水面运上来的垃圾。垃圾箱放在车壳的上面在传送带的后面,由于运上来的垃圾有水,所以我们在垃圾箱的低部设有空洞,目的就是为了将这些水给排出去。
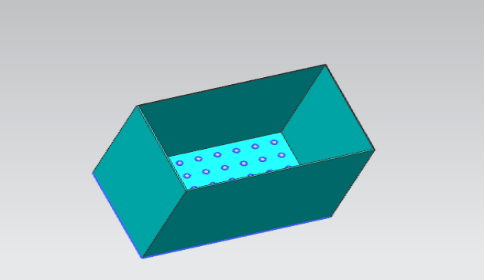
如图2.6
3. 电气控制部分:
3.1太阳能板:
采用单晶硅太阳能板(图3.1所示),多个太阳能电池片按组装的组装件发电,通过吸收太阳光,将太阳辐射能通过光电效应或者光化学效应直接或间接转换成电能,是太阳能发电系统中的核心部分。功率:6W;开路电流1.1A;工作电压:6V;尺寸:长:279mm、宽:180mm、厚:5mm;工作电流:1A;工作温度:-40°C~85°C;开路电压:7.2V;功率公差:±3%。
图3.1
3.2直流减速电机:
直流减速电机(图3.2所示),即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱。齿轮减速箱的作用是,提供较低的转速,较大的力矩。同时,齿轮箱不同的减速比可以提供不同的转速和力矩。这大大提高了,直流电机在自动化行业中的使用率。减速电机是指减速机和电机(马达)的集成体。这种集成体通常也可称为齿轮马达或齿轮电机。其优点在于节省空间,可靠耐用,承受过载能力高;能耗低,性能优越,减速机效率高达95%以上;振动小,噪音低,节能高;经过精密加工,确保定位精度。
直流减速器参数:
24V 30W 60r/min 80kgf.cm(最大扭力)

图3.2
3.3 Arduino Uno开发板
以ATmega328 MCU控制器为基础——具备14路数字输入/输出引脚(其中6路可用于PWM输出)、6路模拟输入、一个16MHz陶瓷谐振器、一个USB接口、一个电源插座、一个ICSP接头和一个复位按钮。它采用Atmega16U2芯片进行USB到串行数据的转换。Uno PCB的最大长度和宽度分别为2.7和2.1英寸,USB连接器和电源插座超出了以前的尺寸。4个螺丝孔让电路板能够附着在表面或外壳上,工作电压为5V。同时,只需要一条USB数据线连接至电脑。我们的履带式两栖水上垃圾收集车就是以Arduino Uno开发面板作为我们作品的程序开发平台,根据现场的实际情况编译程序对履带式两栖水上垃圾收集车的各个动作进行控制。 Arduino Uno开发板的规格:长:75mm宽:55mm高:15mm。
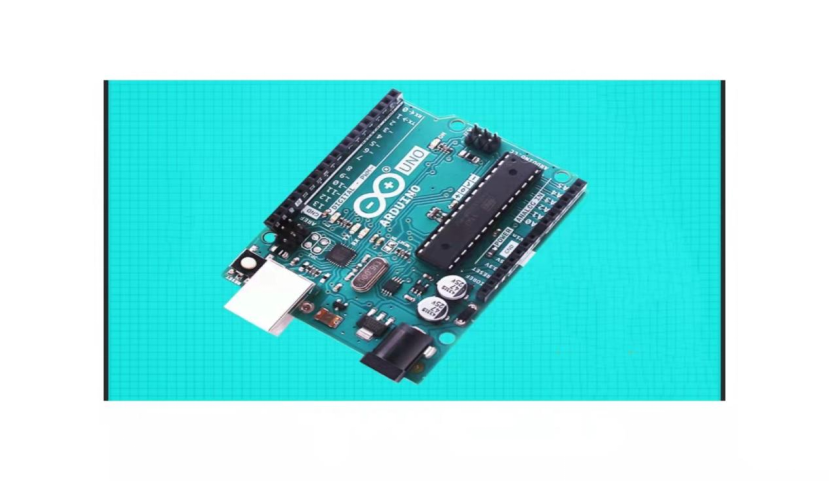
图3.3
3.4太阳能控制器
太阳能控制器(图3.5所示)全称为太阳能充放电控制器,是用于太阳能发电系统中,控制太阳能板对蓄电池充电以及蓄电池给负载供电的自动控制设备。作品中采用型号为F88的太阳能控制器,系统电压为12/24V自适应;额定充电电流及额定放电电流均为50A,光伏电压<41V;太阳能控制器规格:长:133.5mm;宽:70mm;高:35mm。
图3.4
3.5摄像头
履带式两栖水上垃圾收集车配有一个摄像头,并将这个监测摄像头配备在了车体前图(3.6所示),负责观察车身四周的环境,当履带式两栖水上垃圾收集车前方有出现高于车桥地盘的障碍物时自动停止工作。
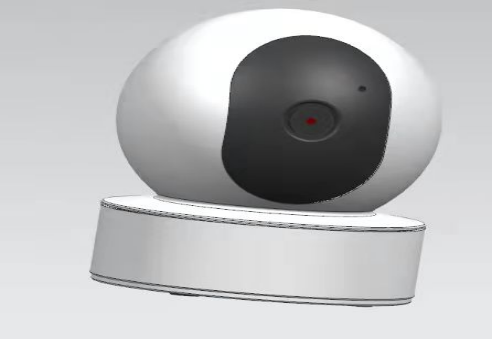
图3.5
3.6蓝牙模块
蓝牙采用CSR主流蓝牙芯片,蓝牙V2.0协议标准。串口模块工作默认电压3.6~6V,一般用5V单片机配套。波特率为4800,9600,19200,38400,57600,115200用户可设置。默认9600。核心模块尺寸大小为:28mm×15mm×2.35mm。工作电流:配对中:30~40mA配对完毕未通信:2~8mA通信:8mA。休眠电流:无休眠。可以与蓝牙笔记本电脑、电脑加蓝牙适配器、PDA等设备进行无缝连接。我们的履带式两栖水上垃圾收集车在Arduini开发板上扩展一个蓝牙模块,目的是为了达到可远程控制的效果。

图3.6
3.7视觉识别模块
视觉识别模块采用的是双目摄像头,双目摄像头是利用仿生学原理,通过标定后的双摄像头得到同步曝光图像,然后计算获取的2维图像像素点的第三维深度信息。 具体点说就是, 人眼是很容易对一个物体的距离进行定位,但当人闭上其中一个眼睛后,定位能力就会下降很多。双摄像头就是模拟人眼的应用。也就是测距离的话,就是通过算法算出,被拍摄物体与左/右摄像头的角度θ1和θ2,再加上固定的y 值(即两个摄像头的中心距),就非常容易算出z 值(即物体到摄像头的距离)。履带式两栖水上垃圾收集车通过采用的视觉识别技术来实现,车可自主搜寻水上垃圾,并进行收集的这一过程。
双目摄像头的型号我们采用的是HLK-RK625-2,它的工作电压是5V,它的长:39mm宽:28mm高:21mm。
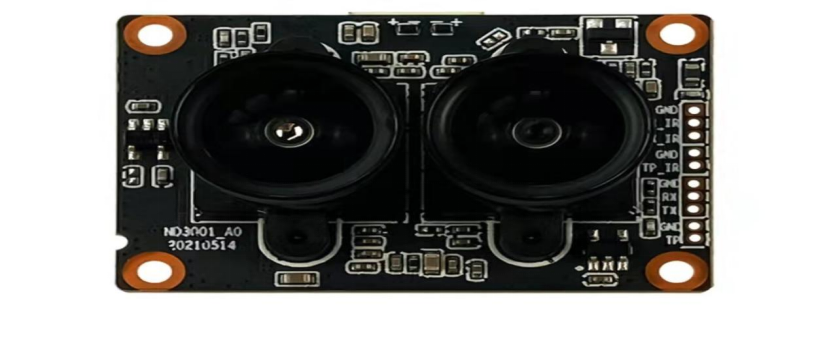 图3.7
图3.7
三、创新点及优势
1.与传统机械不同,履带式两栖水上垃圾收集车采用了新能源装置,使得垃圾收集过程变得更加绿色环保,降低因燃料产生的成本,顺应时代发展,更具发展前景;
2.所使用的摄像头具有识别前方障碍物以实现避障的功能;
3.履带式两栖水上垃圾收集车配有履带,可以实现车在陆地与水面之间的来去自如,不用人为的将车抬进水中,省去了很多的人力资源。
4.履带式两栖水上垃圾收集车装配的传送带与以往的传送带不同,我们在传送带上打了空洞加了传送棱和两侧的挡板,目的是为了将垃圾上的水过滤出去,防止垃圾从两侧掉落和从传送带上滚落。
5.利用Arduino Uno开发面板对作品整体工作程序进行编写控制,根据实际情况自动化运行各个动作,并采用视觉识别模块和蓝牙模块分别起到了对垃圾的定位和对车的远程控制的作用,多种控制渠道,操作简单方便,大大降低了因人力而产生的成本。
四、未来展望
1. 可根据垃圾分类的原理,而使履带式两栖水上垃圾收集车根据不同的垃圾进行智能分类,以实现更加智能、自动的功能;
2. 对车身材料进行升级,使设备总体重量更加轻便且制作成本降低并且由较强的刚度;
3. 对设备部分机械结构进行优化,使收集垃圾的效率更上一层楼;

















