
大赛作品详情
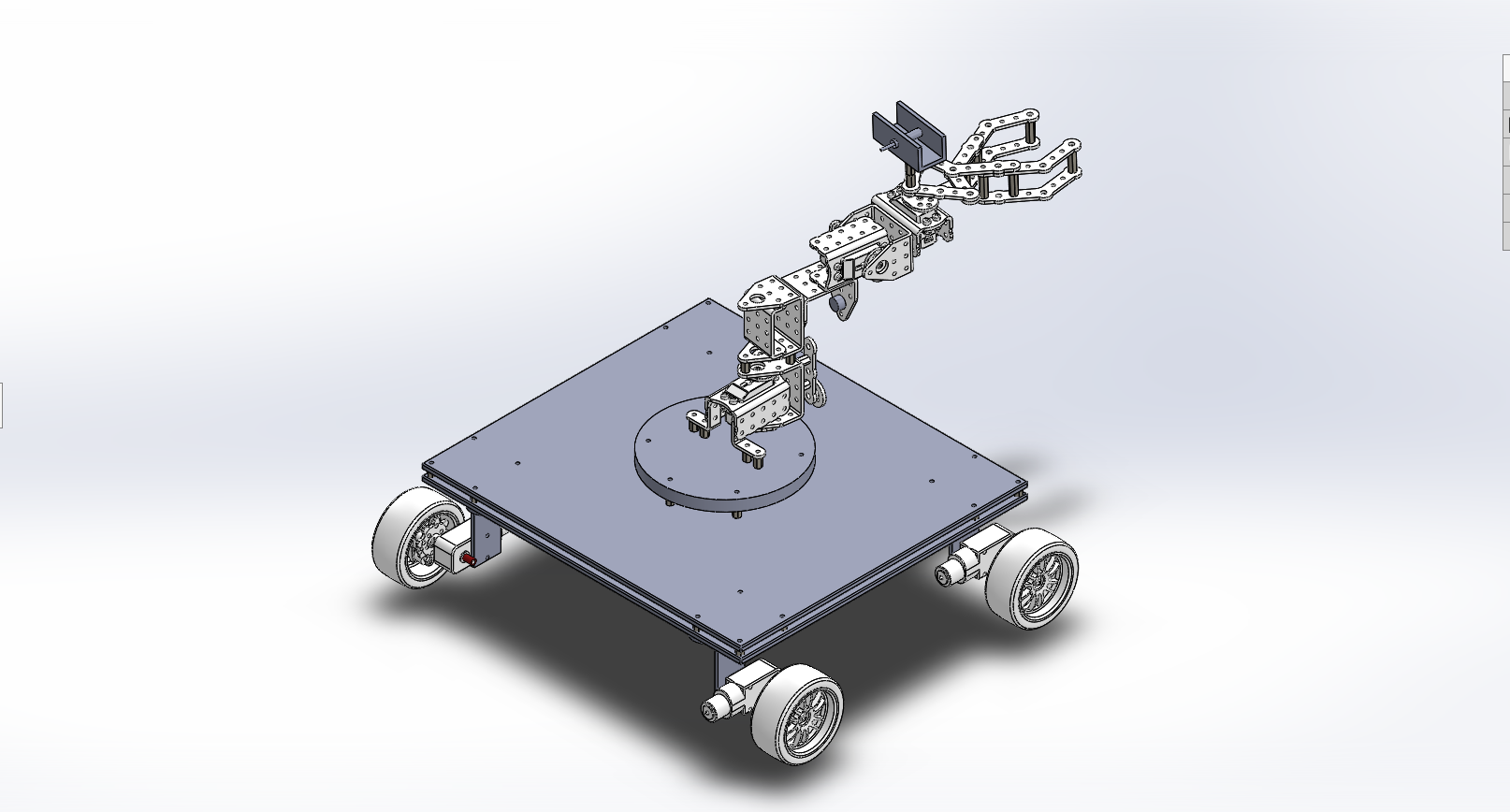
作品名称:育果天使
学校名称:浙江同济科技职业学院
参赛队伍:牛马之家
参赛学生:朱黎辉 贺毅 姜思祺
指导老师:蒋帆 何骥昊


