
大赛作品详情
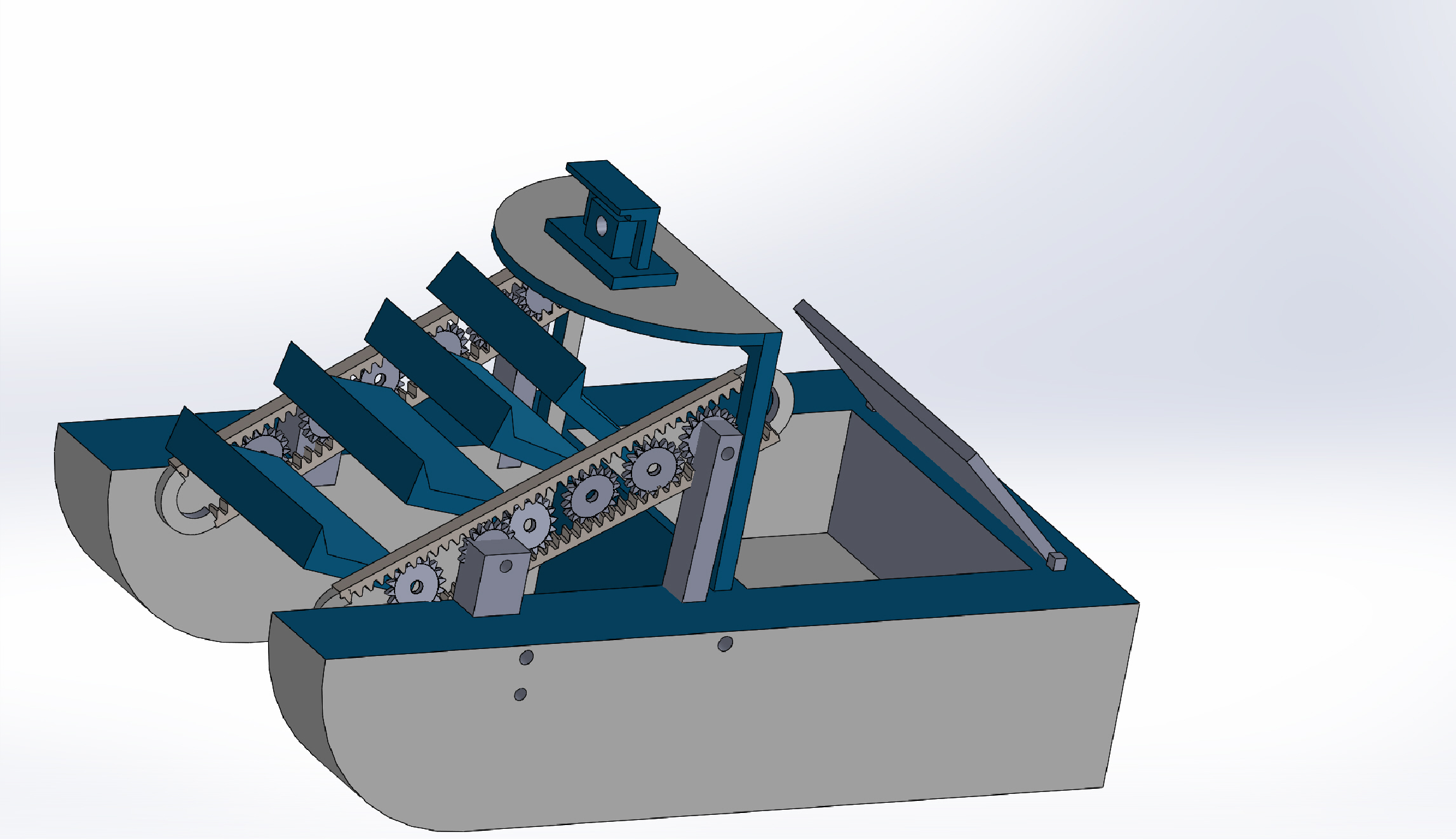
作品名称:水上清洁机器人
学校名称:浙江同济科技职业学院
参赛队伍:精卫队
参赛学生:陈华林 王琳 王锦超
指导老师:蒋帆 何骥昊


