一种栽种植物装树装置简介
设计说明
目前在市面上关于栽种机器人并没有成型的技术方案,而现有的栽种工具都需要人工实时操作,并且栽种植物单一,栽种效率低,为了能够实现栽种多种植物和提高栽种效率,而设计了本产品,可以在各种环境下实现钻地打孔栽种各种植物的功能。
图1装置运动演示动画
如图1,采用三角履带和平行履带结合的运动方式,适应各种恶劣环境。
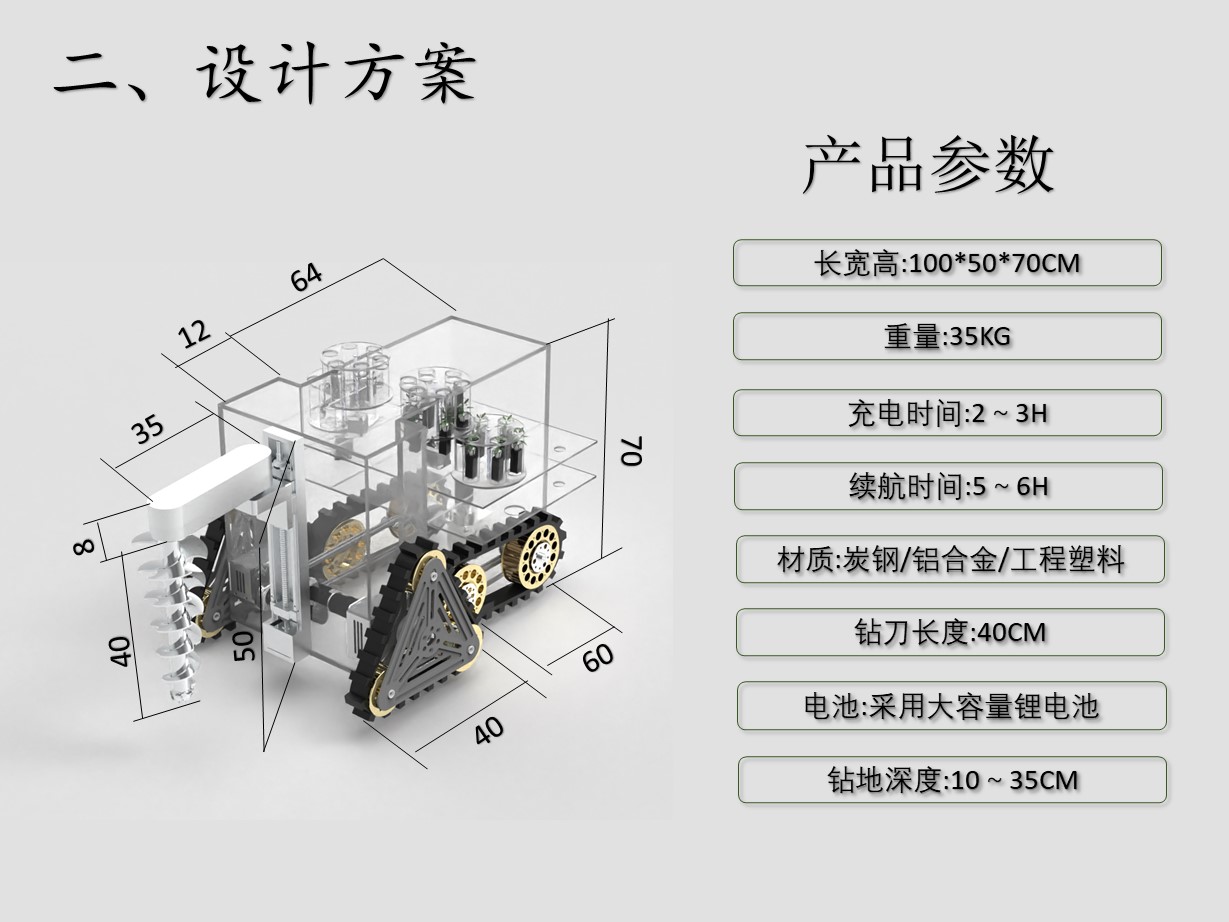
图2 整体结构展示
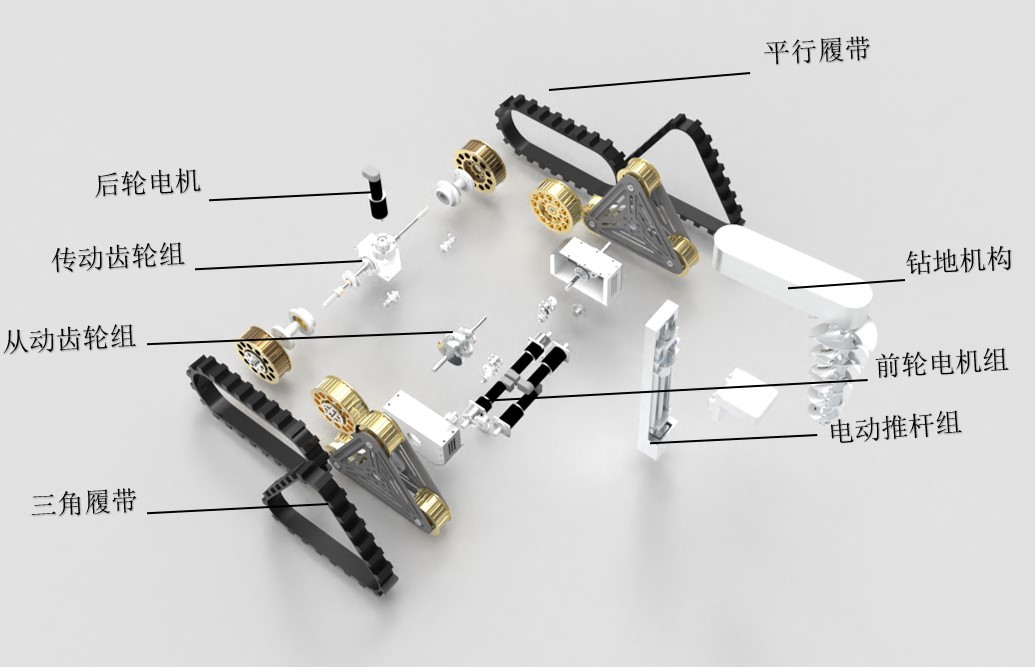
装置主体由电动推杆组、前轮电机组、钻地机构、平行履带、后轮电机、传动齿轮组、从动齿轮组、三角履带等零件构成。
图3栽种结构介绍
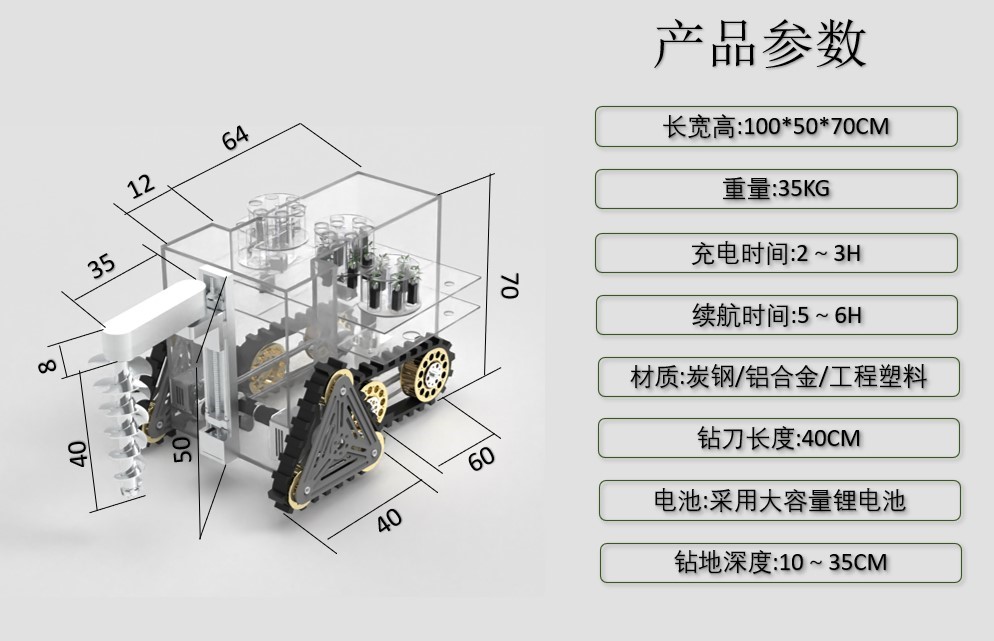
图4钻地结构介绍
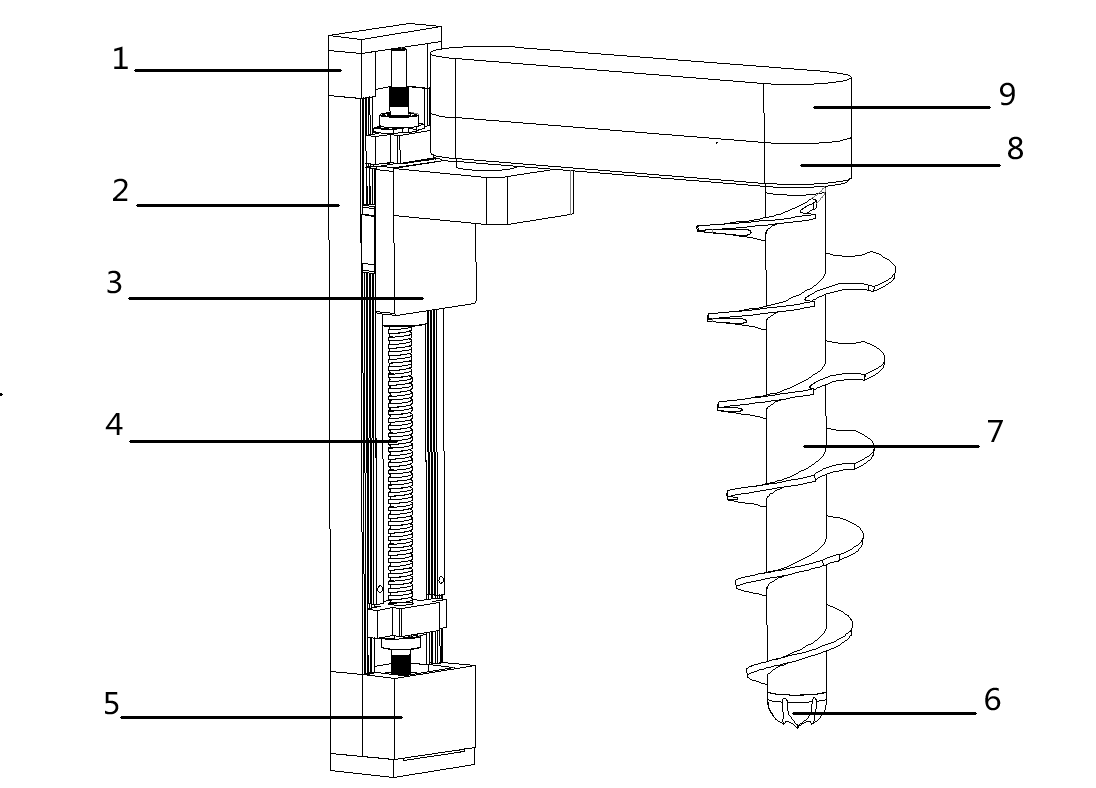
如图:1.上盖;2.丝杆套壳;3.滑块固定平台;4.丝杆;5.下盖;6.钻头;7.打孔卷刀;8.防尘下壳;9.防尘盖;10.转向电机;11.转向轮。
工作原理简介
考虑到,栽种环境的不稳定性,采用电机供能及齿轮传动方式和三角履带和平行履带的组合搭配运动方式适应各种恶劣环境的畅通无阻。
钻地机构采用丝杆和钻机组合搭配的方式实现钻地机构自由升降调整钻地的深度的同时能180度旋转实现两侧钻地打孔。当钻地机构打好两侧的栽植孔之后,装置前进到合适位置由栽种轮盘旋转投掷需要栽种的植物。
栽种轮盘采用双层轮盘式结构储量24棵植物,下层植物栽种完之后上层转动通过传送孔将上层植物投掷给下一层,一次栽种两棵植物。
装置设有碰撞识别装置,装置自带防跌和红外线感应装置来躲避障碍物,采用拓扑算法结合GPS厘米级导航择优选择栽种路线。
引入互联网+控制装置,不仅可以远程操控装置实时知道栽种状态,并且采用待机及时即用的使用模式。装置内部设有人工智能语言助手,在装置不工作时装置处于待机状态,人工智能语言助手可与人进行简单的交互。
手机控制装置的页面如下图:
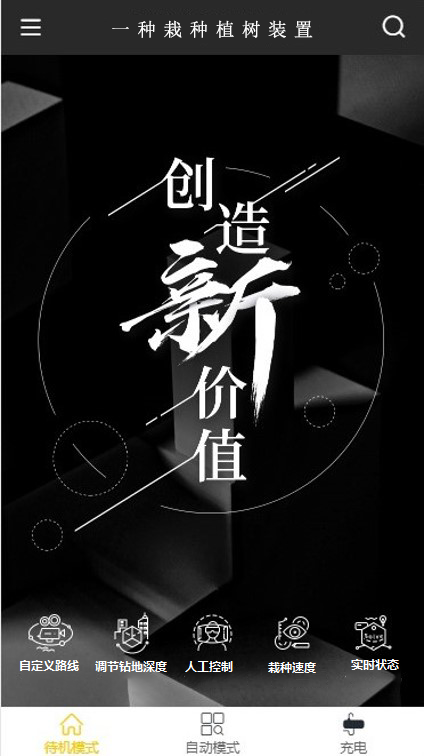
进入控制页面可选自动模式,进入控制页面可选自动模式,进入自动模式后。装置将进行默认的栽种路线、钻地深度和栽种速度进行植物的栽种。
用户可以装置远程操控可自定义栽种路线、钻地深度、栽种速度,并且能查看装置的实时状态。
人工控制:装置可切换为人工远程控制。
自定义路线:用户可从拓扑算法得出的几种栽种路线进行自由选择。
调节钻地深度:用户可以根据栽种植物的根被长度自由选择合适的栽种深度,栽种深度调节范围为10~35cm。
装置低电量时:软件界面会提示电量不足,及时充电。
实时状态:用户在终端可以查看到装置的栽种路线及已栽种植物的分布情况。
待机模式,采用待机及时即用的使用模式。装置内部设有人工智能语言助手,在装置不工作时装置处于待机状态,人工智能语言助手可与人进行简单的交互。
总结
本设计为团队原创,其结构紧凑,工作原理简单具有良好的可靠性。体积小巧,适用于各种环境使用。由于时间紧张许多细节尚未完善,望老师们谅解。如有幸通过初赛我们将奉上更完善的讲解视频。
注:由于设计过程中为方便创造,采用自顶向下设计所以未生成过多独立零件。