
大赛作品详情
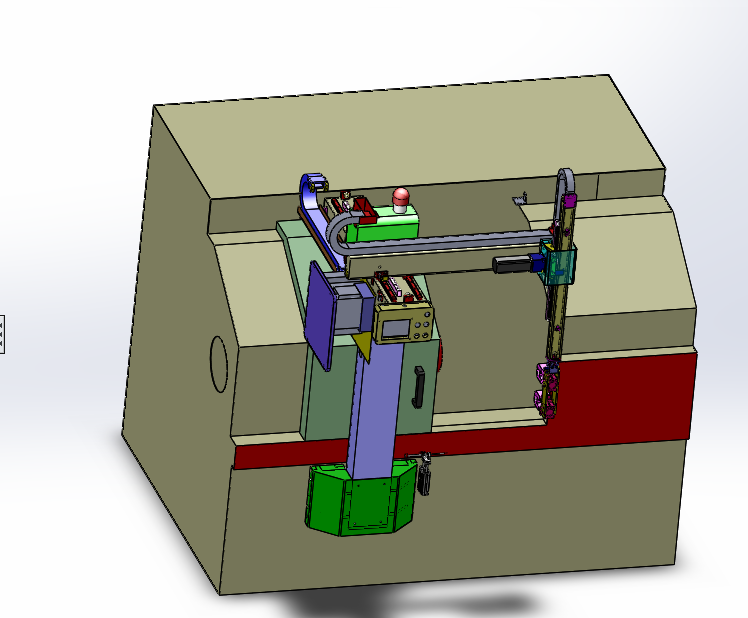
作品名称:上下料机器人系统设计
学校名称:桂林理工大学
参赛队伍:雄狮团
参赛学生:覃迎奥 张家晗 黎灿贤
指导老师:代宣军


