
大赛作品详情
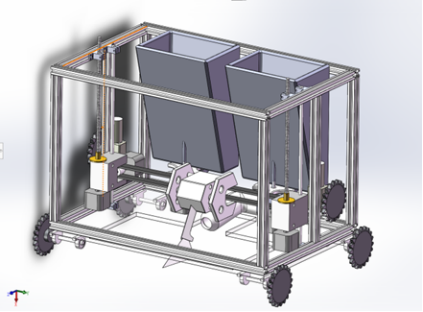
作品名称:花椒环状沟施肥料一体机
学校名称:潍坊学院
参赛队伍:勇拓队
参赛学生:朱佳豪 马萌娅 李清华
指导老师:王伟章


