产品概述
汽车停车开门时由于驾驶员不正确的开门方式和行人观察不周发生多起交通事故,为了避免发生这样的事故,可以对驾驶人或乘车人进行安全培训,但是效率很低,对此我们发明了一种“汽车开门防撞装置”,它可以有效的避免这种事故的发生。门侧如果有电动车等驶来时,语言提示的同时,汽车的车门无法通过内扣手打开,等驶离检测区域即可正常打开车门,如果想紧急下车或门侧物体对驾驶员没有构成威胁时,按一下误判开关即可打开车门,语音提示及警示灯提示可以单独控制关闭和打开,取决于驾驶员习惯
整体构造
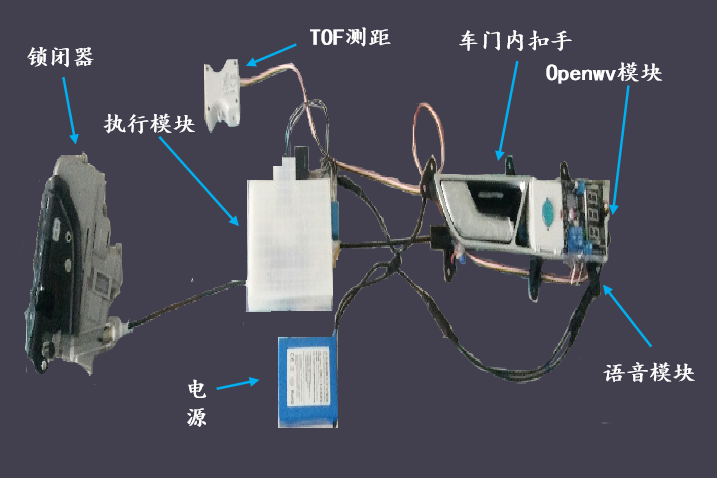
本产品汽车开门防撞系统包括电源模块、探测模块和执行模块, 所述电源模块为探测模块和执行模块管理供电,所述探测模块安装在车身,且用于探测汽车周围物体,并产生用于控制执行模块的电信号, 所述执行模块安装在车拉手与车门锁闭器之间的拉线上;执行模块根据探测模块传送的信号可以分别执行闭合或分离的动作,进而分别控制。
执行机构
执行机构有两个滑动齿条,一个滑盖,一个推拉式电磁铁吸盘和外壳组成。滑盖的上端与推拉电磁盘相连,推拉电磁盘供电,可以实现电磁盘将滑盖提起,脱离粘合。下端与上齿条相连,上齿条上有两个凹槽分别在滑盖里的凸起里可以滑动,下齿条两侧的凸起在壳体的凹槽里可以滑动,壳体的凹槽长度经过测量设计,正好为内扣手和锁闭器的行程,顺便达到限位作用,以防止产生较大的自由间隙,为了减少摩擦力,两者采用轴承连接。上齿条的后端与外壳通过拉簧连接,可以实现回位作用,前端与内扣手拉线相连,下齿条的后端与锁闭器拉线相连,另一端与拉簧相连,以实现齿条带动拉线使锁闭器运作和回位作用。
摄像头模块
我们加入摄像头进行测距、往后还会加入行车记录仪、后视镜电子显示等功能,采用一侧三摄无死角,通过openmv 测距扩展板进行距离检测,误差不超过 1mm,并且一旦在摄像头识别 400mm 以内出现不明物体时,会有发出警报并且伴有红灯闪烁。执行模块负责执行相应的运作,我们的仿真测试,通过算法来让摄像头探测达到测距的效果,而且我们加装摄像头后可以在倒车时实现辅助倒车 360 度无死角,在行车时还有行车记录仪功能,显示屏设置在反光镜的角落里,我们也可以随时观察交通信息,但是我们的基础功能是通过摄像头来测量非机动车距离,从而来控制我们的执行器,在下车开门时非机动车进入威胁区域时,控制执行器断开,我们此时无法打开车门,等到非机动车离开威胁区域时可以正常打开车门,但是想紧急下车我们还设置了误判开关,此开关启动后 5S 内可以开启车门。
语音模块
语音模块有 12 个端口可以实现 12 种语言,提示“小心门侧车辆, 以防发生事故”“注意门侧安全”语音输入程序。当推拉电磁盘工作时,其上的语音继电器也闭合提示“小心门侧车辆,以防发生事故”。当误判开关开启时,电能将推拉电磁盘的常闭继电器启动,推拉电磁盘电路断路,不会运作,其上的语音继电器闭合,提示“注意门侧安全”以实现语音提示功能。其上有扬声器开关和音量调节旋钮,当不想开启语音提示时可以关闭,当声音大小不适时可以进行调节。
误判开关
误判开关是一个延时开关(1s-2min 延时可调开关),下车开车门时当检测到门侧物体时,控制吸拉电磁盘提起,但是想紧急下车时, 按下此键,5S 内吸拉电磁盘的常闭继电器开启,形成断路了,吸拉电磁盘不工作,此时可以开启锁闭器。
限位开关
限位开关安装在内扣手轴附近,它是串联到雷达探测模块到吸拉电磁盘中的电路之间,当雷达探测模块检测到物体时,电压信号是传不到吸拉电磁阀的,只有开车门时内扣手在自由行程旋转一定角度时,限位开关导通此时吸拉电磁盘才工作。可以减少电能消耗和吸拉电磁盘工作频率。
工作原理
下车开车门时当摄像头没有检测到障碍物体时,无输出电压,吸拉电磁盘电路不运作,执行器不工作,可以实现正常开车门。
下车开车门时当摄像头模块检测到有物体靠近时,输出电压信号,推拉电磁盘电路导通,将滑块和上齿条吸起,此时内扣手的拉力是空载,拉力不经过齿条传给锁闭器,处于控制状态,驾驶员无法打开车门。
当摄像头模块检测到物体靠近,但是驾驶员遇到紧急情况或门侧物体不对驾驶员造成威胁时,可以按下误判开关,这时误判开关给吸拉电磁盘常闭继电器供电,继电器触电断开,推拉电磁盘回位,车门可以正常打开,