我们设计的是一种全气候环境下能够实现智能搬运的设备,它运用领域较广泛可以用于高温、高压、低温、低压、噪声、臭味、有放射性物质等环境,本次设计的作品主要是为了能够很好的代替人在那些环境苛刻还比较繁琐的地方,或者用于流水作业,通过机械手反复百步亭的工作,从而达到节约人的体力。基本思路;通过自动化控制来实现搬运。技术关键是传感器检测到物品后能进行自动搬运。
1、设计背景
随着科技的进步和时代的发展,越来越多的机器人和自动化机器设备在不断
的更新和发展中已经成为动作生活中一种不可或缺的劳动力,但是在一些中型或
者小型的企业仓库、医院药房和快递仓库都缺少一种自动化搬运设备往往都是靠
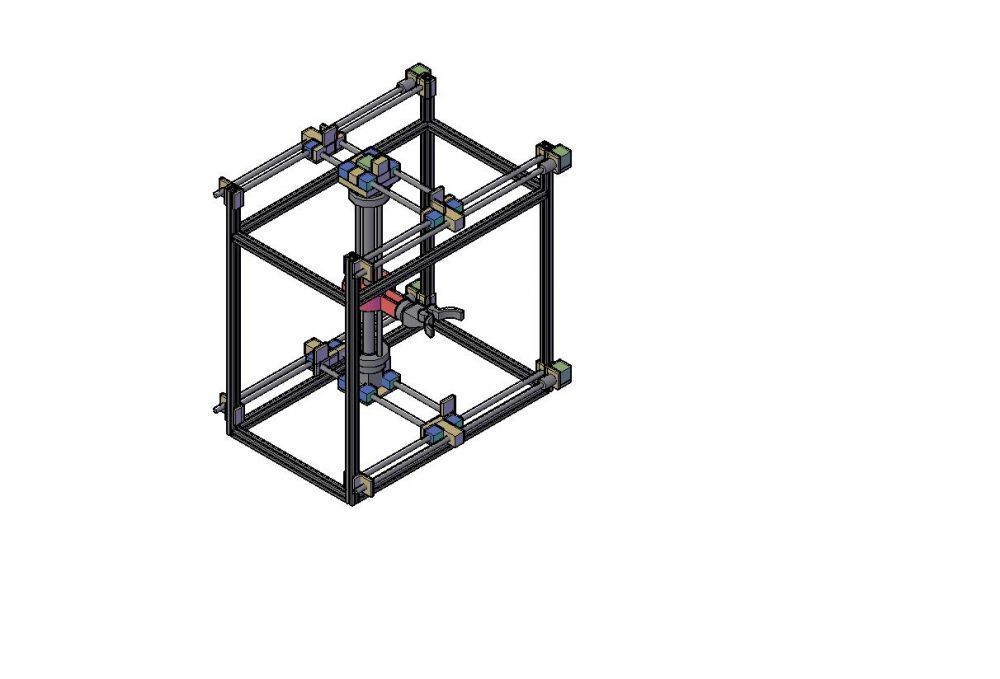
叉车或者人力来搬运货物,所以根据这些需求我们设计和制作了“一种具有五自
由度的机械手搬运系统”,它可以用于各类的工厂、仓库、生产线,可以大大提
高工作效率,保障产品的质量,解放出更多的人工劳动力,解放出来的人工成本
可以投入到还无法被智能制造技术代替的行业。
2、设计目的
本文设计的是一种具有五自由度的机械手搬运系统,它运用领域较广泛,本
次设计的作品主要是为了能够很好的代替人在那些苛刻而比较繁琐的地方,或者
用于流水作业,通过机械手反复百步亭的工作,从而达到节约人的体力。灵活的
机械手在生活中大量的运用,使其人类的生产效率得到了一个大幅度的提高,同
时也改善了我们人的工作环境,能够让人们的生活变得越来越智能化。
3、设计要求
本次设计的智能机械手在相对的各个关节强度应保持在重量上的平衡度,这
样能够减轻舵机负载量运动的响应速度,在设计机械手时应尽量考虑在安装与其
他部件连接时的稳定性,平衡能力与其在抓放物体时承载的力度;机械手臂在结
构上也要考虑各关节的缓冲能力。
五自由度机械手搬运系统移动迅速,精准度高,稳定性强,移动范围大,自
动化控制,适用于多种行业领域等。它运用领域较广泛,适用于仓库对货物进行
上架出仓;物流公司对快递货物的分拣搬运;医院药房自动取药等领域。本次设
计的作品解决了特殊产业对操作精准高的要求;解决流水生产线对操作速度的要
求,解决高危产业中危险操作时人的安全保障问题等。灵活的机械手在生活中大
量的运用,使生产效率得到了一个大幅度的提高,生产安全得到提高,同时也改
善了我们人的工作环境,能够让人们的生活变得越来越智能化。
4、五自由度机械手搬运系统的设计理念
(1)人力生产加工无法连续长时间工作,现在大部分企业采用轮班制。而机
器手可以连续长时间工作,大幅度提高了生产效率。
(2)每个人操作习惯不同,加工出的产品多少存在误差。机器手运动数据都
是程序设置的,机器手的每一个位置都是固定不变的。生出来的产品质量高误差
小。
(3)在高温、高压、低温、低压、噪声、臭味、有放射性物质的环境场合,
人直接操作工作无法保证工作人员的生命健康安全。而用机械手可以代替人完成
大部分的工作,使人的工作条件得以改善。
(4)在现在工业化自动化发展推动下,机械手已经成为未来工厂不可以缺少
的重要组成部分。
(5)现在工业中使用的机械手大部分都只支持在固定位置的 360 度范围运动。
我们看到这方便的需求设计这套五自由度机械手控制系统。
5、五自由度机械手搬运系统的应用范围
1.冶金 2.化工 3.医院 4.航天航空 5.物流 6.仓储