
大赛作品详情
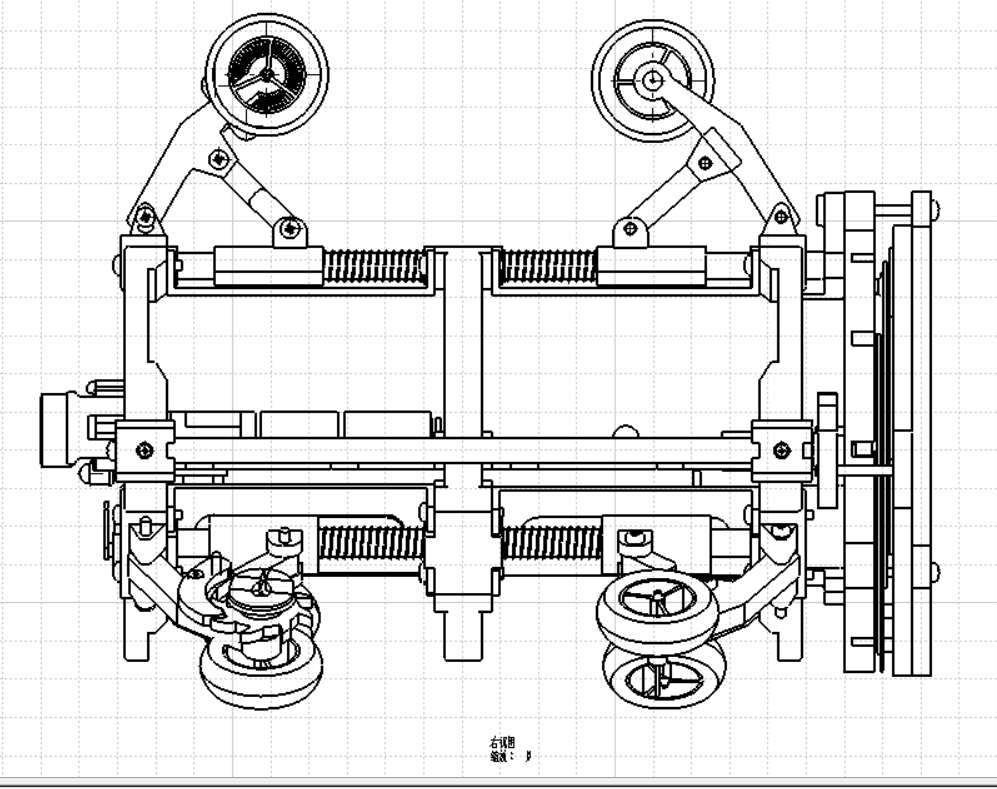
作品名称:管道内检测机器人
学校名称:天津职业技术师范大学
参赛队伍:天职师大-3D打印五队
参赛学生:徐永梅 林怀鑫 肖月
指导老师:王钰 刘晶


