
大赛作品详情
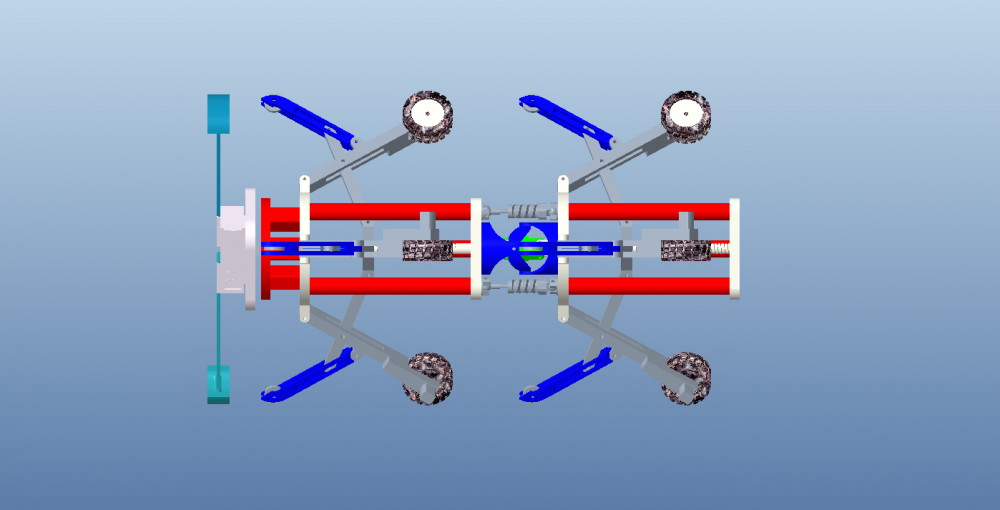
作品名称:管道内壁巡查清污机器人
学校名称:宿州学院
参赛队伍:黑科技
参赛学生:白洋威 朱丁笑 吴彦霖
指导老师:胡学青 王楠


