
大赛作品详情
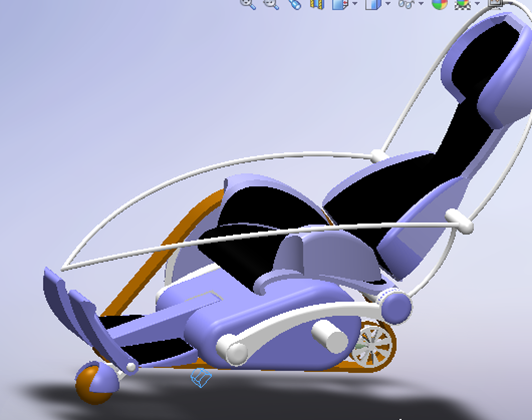
作品名称:智能多地形轮椅
学校名称:营口理工学院
参赛队伍:A小队
参赛学生:赵东岳 郭宇航 刘喆
指导老师:刘鹏 王倩


