
大赛作品详情
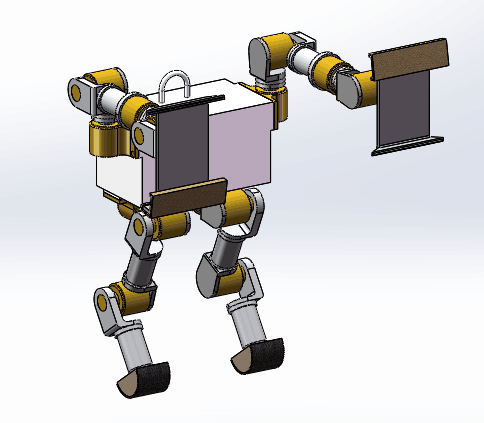
作品名称:具有类人工作模式的高空清洁机器人
学校名称:山东交通学院
参赛队伍:“智”造
参赛学生:马江山 李书童
指导老师:王海燕


