本装置适用于智能汽车、无人驾驶汽车以及装有SBW线控转向系统的普通电动车辆上。本设计将驱动机构、制动机构和减振机构集成在汽车车轮中,降低车辆非簧载质量、增强整车稳定性、简化了车辆底盘结构,在满足车辆在正常行驶工况各种性能要求的前提下,同时也可以为车辆提供更大的角度转向,甚至原地转向,并能够实现车辆横向行驶、斜向行驶的功能,极大提高汽车行驶效率。
开发背景
现有智能汽车的车轮转向角度一般限制在25°~40°之间,因此在停放时要求较大的调整空间,而随着汽车数量的激增以及城市人口密度的逐步增大,原本有限的城市生活空间已变的更加紧张,因此急需开发一款智能汽车用全向转向装置以应对停车空间逐渐紧张的难题。
当前研究领域针对这一问题已有一些应对方案,如专利号为200810000129.7的专利文献中公开了一种电动汽车横向行进及顺逆时针旋转车身转向机械传动技术,专利号为201521090604.6的专利文献中公开了一种原地转向及横向行驶的轮毂电机电动汽车转向装置等,但这些技术手段皆采用传统机械转向装置,不仅占用空间较大,而且结构复杂,不利于大规模的推广应用。
结构说明、功能
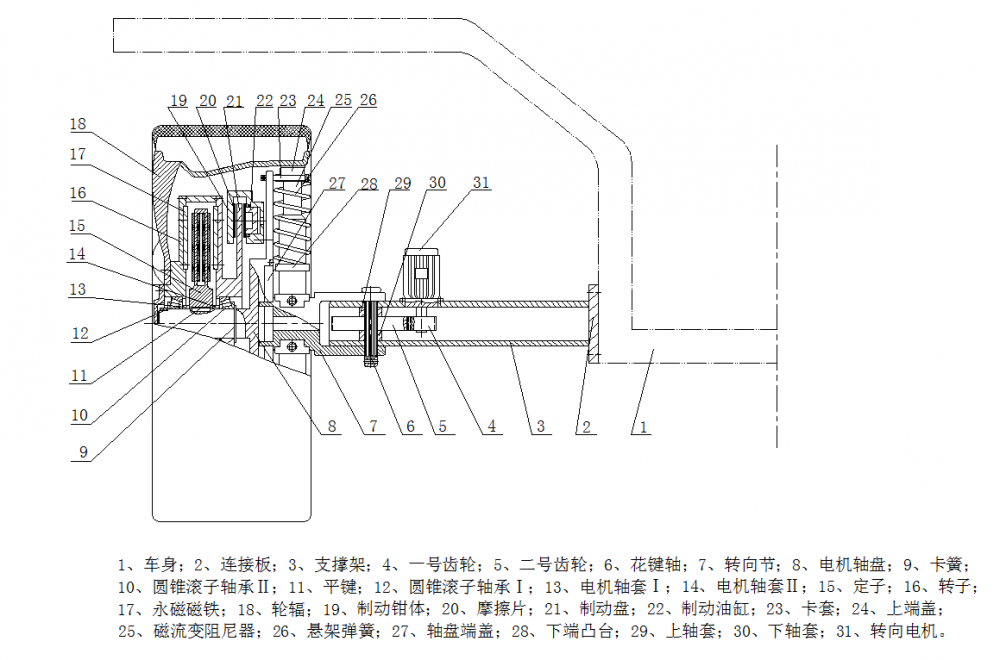
智能汽车用全向转向装置,由转向机构、驱动机构、制动机构以及减振机构组成;转向机构包括支撑架、转向电机、转向节;转向电机固定设置于支撑架上;转向电机的输出端设置有一号齿轮,一号齿轮位于支撑架的内部;一号齿轮与二号齿轮相啮合;二号齿轮套置于花键轴上,通过花键轴、上轴套及下轴套,实现其径向以及轴向定位;转向电机的输出扭矩通过一号齿轮、二号齿轮传递给花键轴,进而带动转向节旋转,满足汽车转向要求;
使用说明
本装置动力部件动作皆由整车控制器对车辆状态传感器发送的信息进行判断处理所发出的命令控制。轮毂电机采用分布式控制,加速响应快,节省能源,并可以通过控制工作电机的数目,满足车辆四轮驱动、前轮驱动或者后轮驱动的
工作要求,更进一步实现节约能源的目的,并可以通过控制电机的正转反转实现车辆的前进倒退;减振机构整合于车轮之中,降低车辆非簧载质量,提高车辆稳定性能;转向机构可根据整车控制系统发出指令来完成其工作要求;动力部件动作皆由整车控制器对车辆状态传感器发送的信息进行判断处理所发出的命令控制。本装置将驱动机构、制动机构和减振机构集成在汽车车轮中,在降低车辆非簧载质量并增强整车稳定性能的前提下,极大的简化了车辆底盘结构,使其拥有更大的车载空间,车身布置的设计自由度大大改观。