
大赛作品详情
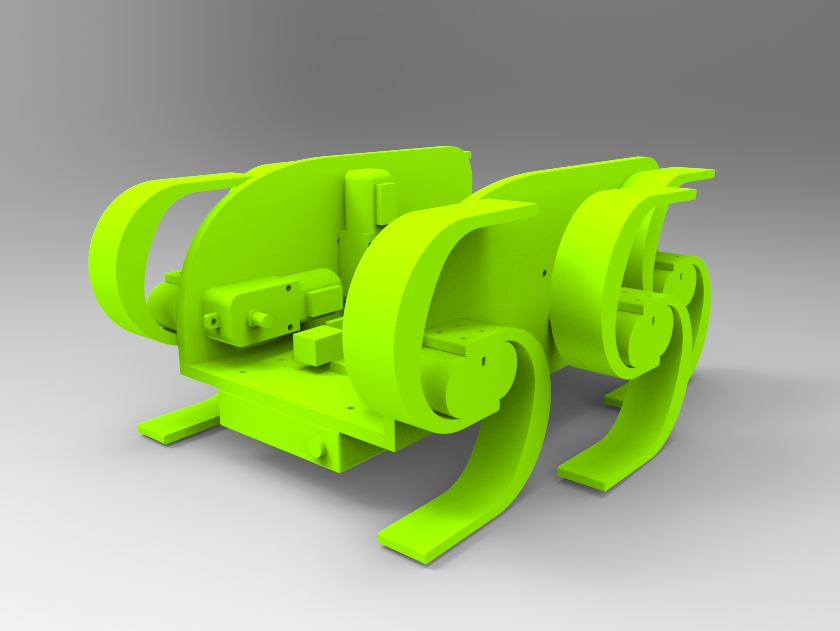
作品名称:轮腿式六足机器人设计
学校名称:宜春学院
参赛队伍:天工壹号队
参赛学生:朱旭 刘洪 刘忠
指导老师:陈鹏 杨静


