
大赛作品详情
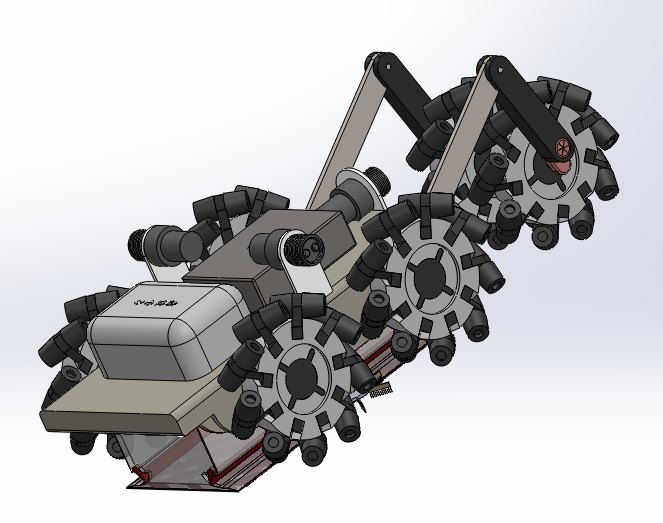
作品名称:楼梯清扫机器人
学校名称:山东交通学院
参赛队伍:梦飞3队
参赛学生:吴鹏飞 朱亚男 邴振凯
指导老师:宁兴旺 周靖


