
大赛作品详情
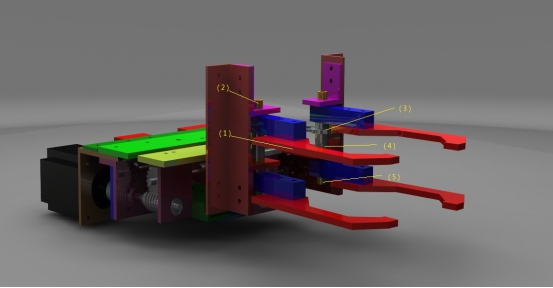
作品名称:自适应智能爬树移动平台机器人
学校名称:山东理工大学
参赛队伍:理工飞跃队
参赛学生:张加斌 成世贺 张葛
指导老师:宫金良


