
大赛作品详情
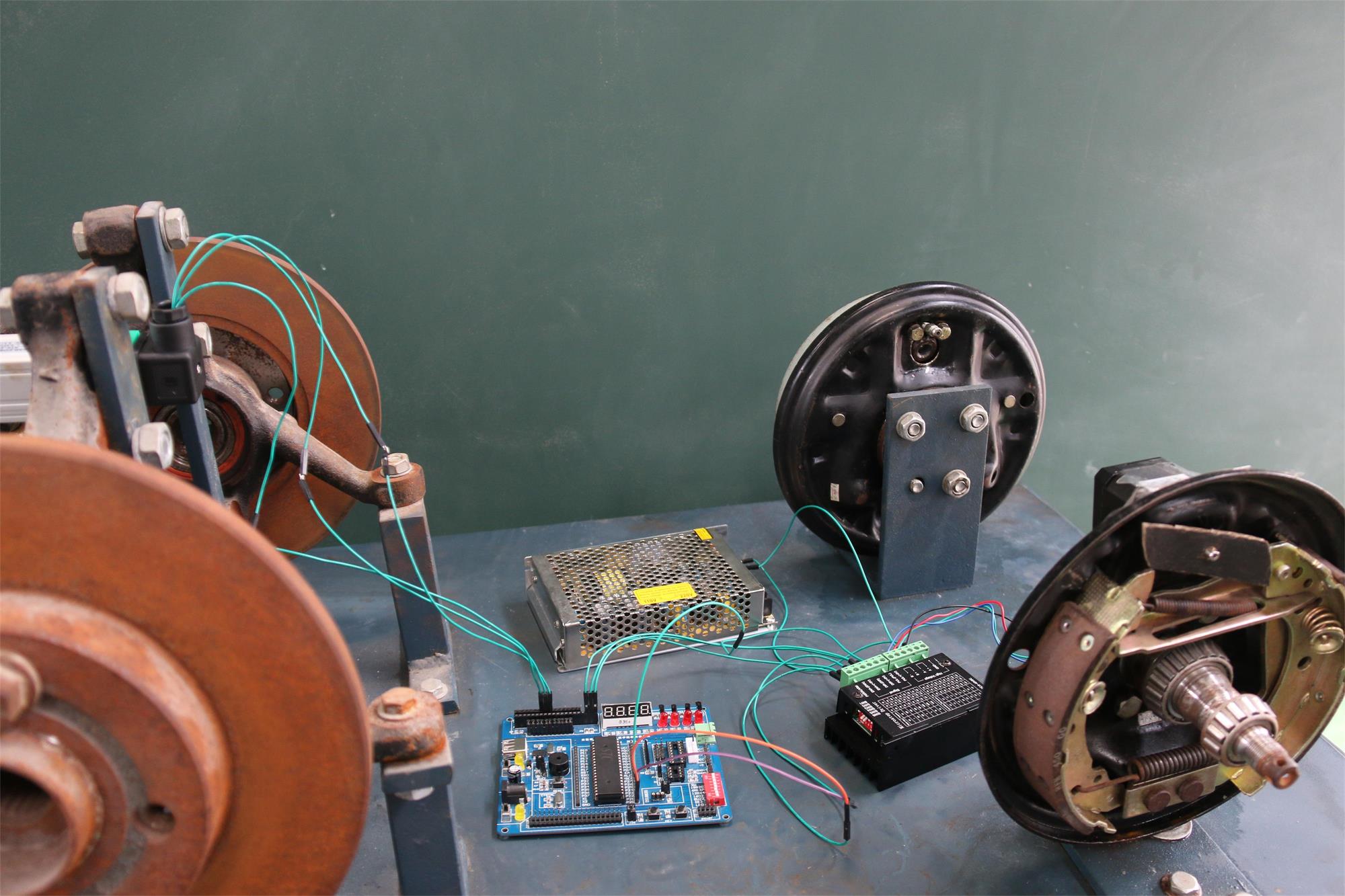
作品名称:新型制动系统的研究与设计
学校名称:安徽理工大学
参赛队伍:24678
参赛学生:尹培坤 王欣 吴超
指导老师:靳华伟 张淼


