
大赛作品详情
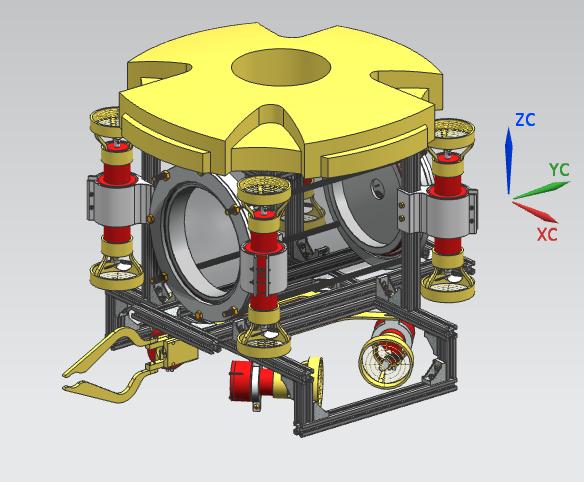
作品名称:水下机器人
学校名称:常州冶金技师学院
参赛队伍:常冶梦之队
参赛学生:焦超超 张云峰 毛俊龙
指导老师:张科 陈浩


