
大赛作品详情
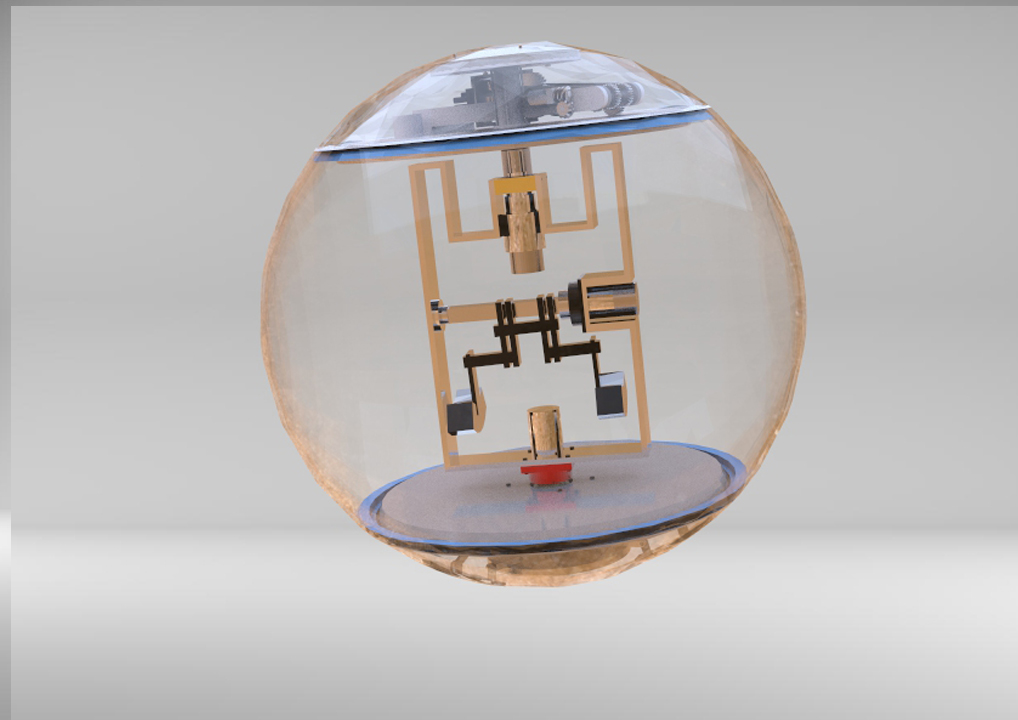
作品名称:球形机器人-筋斗云
学校名称:山东农业大学
参赛队伍:岱下求知
参赛学生:魏亚男 曹鑫鹏 韩双蔓
指导老师:李玉道 束钰


