
大赛作品详情
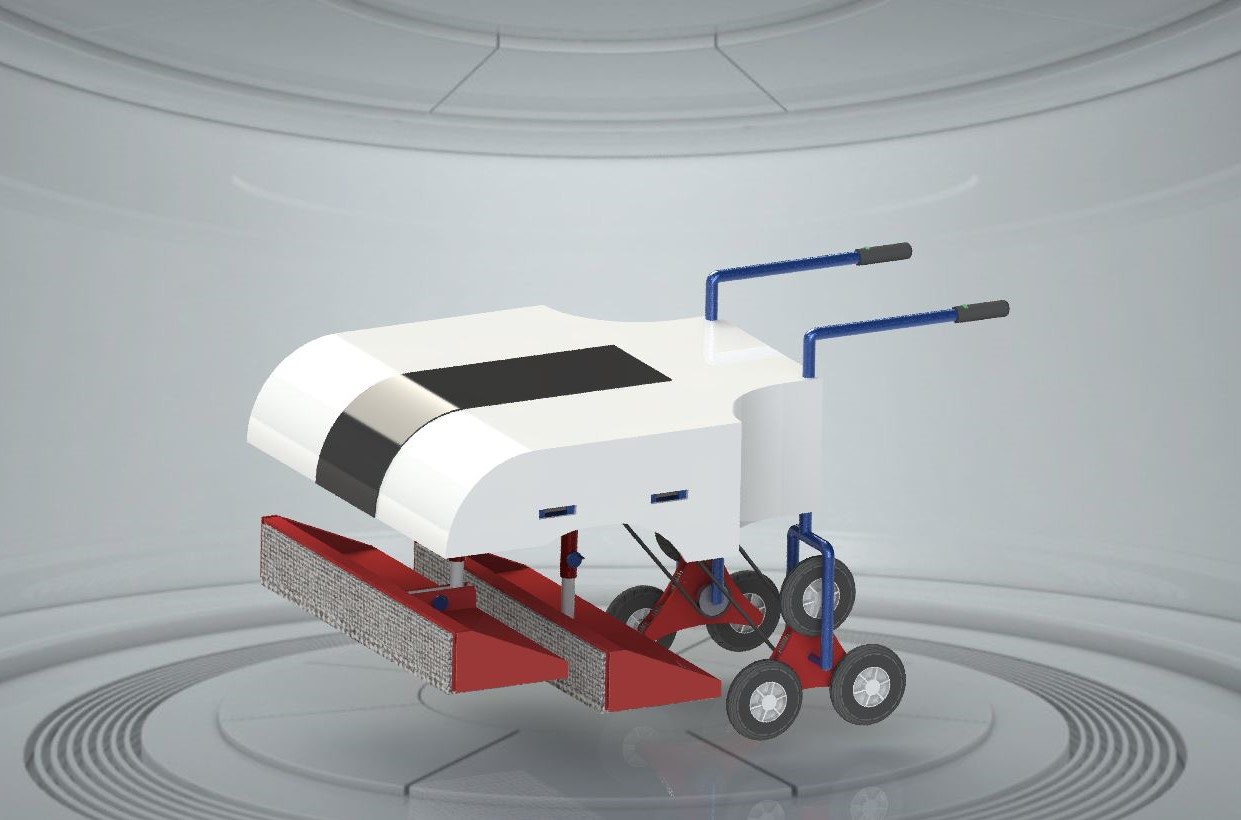
作品名称:智能楼梯清洁机
学校名称:山东科技大学
参赛队伍:梦想队
参赛学生:王作禄 赵玉棠 龚智伟
指导老师:刘宗峰 赵刚


