
大赛作品详情
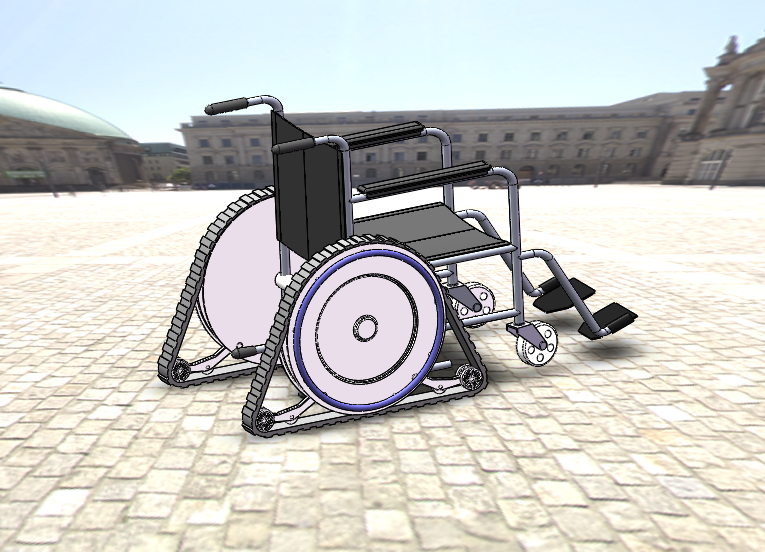
作品名称:轮履复合式电动轮椅
学校名称:中国人民解放军军事交通学院
参赛队伍:军交六队
参赛学生:李锡栋 王书林 罗传涛
指导老师:冯仁余 田广才


