
大赛作品详情
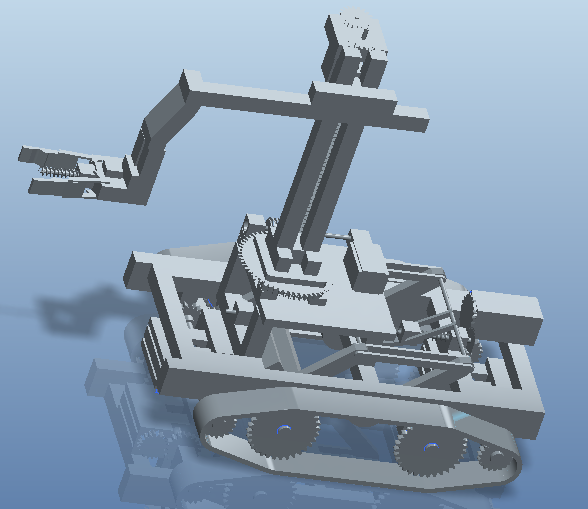
作品名称:双驱动可遥控救援机械
学校名称:宿州学院
参赛队伍:宿院二队
参赛学生:方波 张国锋 范伟宏
指导老师:刘浩 张淑芳


