
大赛作品详情
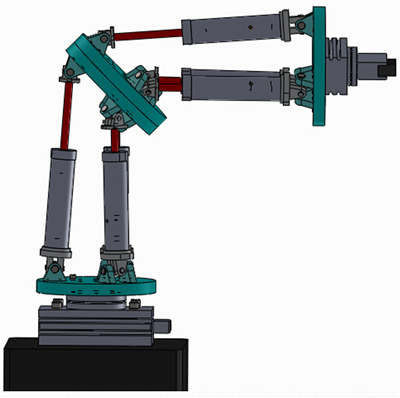
作品名称:六自由度气动机械手
学校名称:巢湖学院
参赛队伍:飞跃
参赛学生:唐燕翔 张羽 张燚
指导老师:代光辉 张晴晴


