水空无人机属于一个全新概念的飞行器,研究多栖飞行器涉及到空气动力学、水动力学、材料学、结构力学等多学科先进技术,是一个很复杂的问题,本设计就这个概念进行了深入研究,在现代研究成果的基础上创新,完善了水空两用无人机目前存在的部分缺陷。
设计主要针对水空两用无人机整体及驱动部分进行设计,对无人机的应用着眼到水下,通过相关资料及仿生学,并结合新型材料的应用,提出一种能用于空中飞行;能在海面等水域执行任务时潜入水中,进行水下勘测;能浮到水面并从水中飞到空中的无人机设计方案。这种机器可应用于未来多栖战斗,森林防火,水底勘测,海上摄影等领域。重点对水空两用无人机的核心——动力部分进行了折叠、仿青蛙游动的设计,改用水中所富含的氢及太阳能电池作为能源,使其动力更为持久。
未来战场将呈现“一体”、“联合”、“全维”等特点,多栖作战武器,尤其是水空两用设备的研究就变得至关重要。早在二战中,各国军队便纷纷将高科技不断融合于登陆工具,构想出了很多作战中的神兵奇将;1958年到1962年间,美国人里德(Reid),康威尔(Convair)先后研制出第一种水下飞机以及新型水下飞机;90年代,美国又首次开始研制潜射无人机,先后研制了海上搜索者、鸿鹅、海上哨兵三型潜射无人机。
目前国内开展的多栖飞行器的研究主要是针对既能在陆地滑行,又能在空中飞行,还能在水面航行的飞行器的研究,关键技术研究并不充分,2012年,我国北京航空航天大学首次设计出了一款仿“鲣鸟”水空无人机,但从描述看,该机在原理上应与美军鸬鹚海空两栖无人机类似。
本次设计的水空仿生无人机以ROV为基体,通过动力系统的设计使其可以实现搭载ROV进行水下+空中作业,功能相对ROV的等级分为普通级和专业级:普通级是通过成本控制,使其面向低端市场如海上海下摄影、森林防火、海上巡逻等方面,并结合时尚元素对外形进行了设计;专业方面则主要承担科学考察、勘测、水陆搜救、军事作战等任务。设计主要方向是科学考察无人机。
根据设计构想,需要对所设计的水空两用无人机提出几条基本要求:第一条是其体积必须尽量小,第二条是能够完成从水面飞到空中、空中飞行,空中潜入水下、水下潜行的运动,第三条是要节能环保,且具有长时间续航能力,第四条是能够完成水下勘测任务及飞行任务。
设计主要分为以下几个部分:
1、勘测部分:主要由声纳、无线电收发装置及外接设备组成。
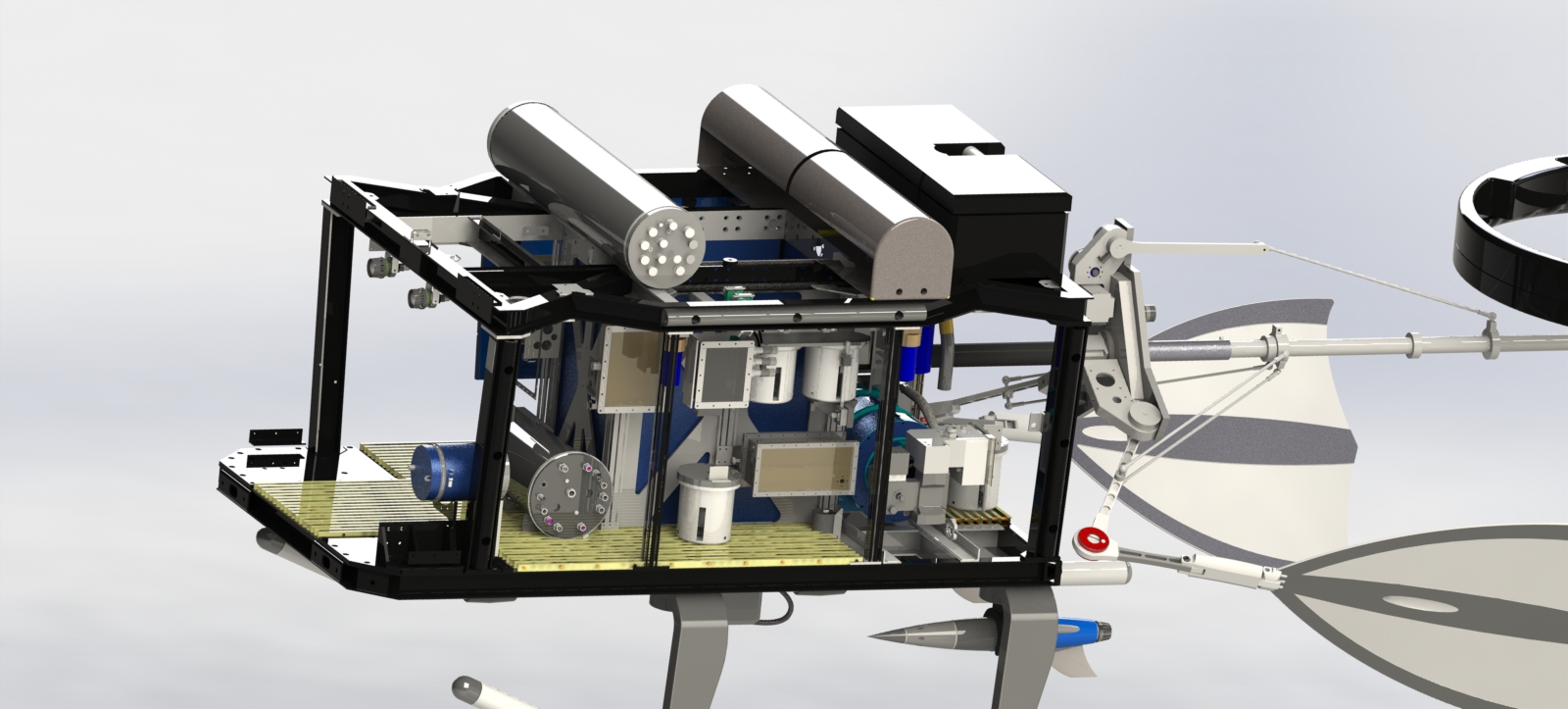
2、机械手部分:安装于机身下方,由剪切机械手,抓取机械手、液压系统和采样存储篮组成。水下最大作业直径为1.5m,分别实现了水下物体的剪切抓取和临时存储。
3、控制部分: PAC融合了PLC和IPC各自的优点,将IPC强大的计算能力、通讯处理、广泛的第三方软件与PLC可靠、坚固、易于使用等特性最佳地结合在一起,因此采用PAC作为水空仿生无人的智能控制系统。
4、动力部分:由水上折叠螺旋桨、太阳能电池、锂电池及水下仿生动力、新型能源组成。
5、管路部分:管路主要以塑料管和不锈钢无缝管组成,外部管采用焊接接头,内部采用螺纹接头。
6、压载部分:由气体控制水的流进流出来调节浮力,气囊收放控制浮力及紧急上升系统。
7、照明部分:采用石英卤素灯组加HID灯和HMI灯,保证无人机在前方7m范围内视野清晰。
8、定位部分:设计参考 Honeywell 公司的 RS-505/DE 定位系统。它是一个短基线的导航系统。该系统的包括两个分系统:一个是声学定位指示器;另一个是精密导航信息处理器。
9、外形部分:在保留仿生结构的基础上,采用蝌蚪的第二形态进行了拟人化,时尚性设计,搭配了多种配色方案。