多地形移动救援机器人
开发背景:我们的设计的背景来自于今年8月份天津爆炸事件,此次事件造成了大量的消防员和平民的伤亡。我们希望能够设计出一款适应多地形的救援机器人来完成高危情况下的救援,减少不必要的人员和财产的伤亡。
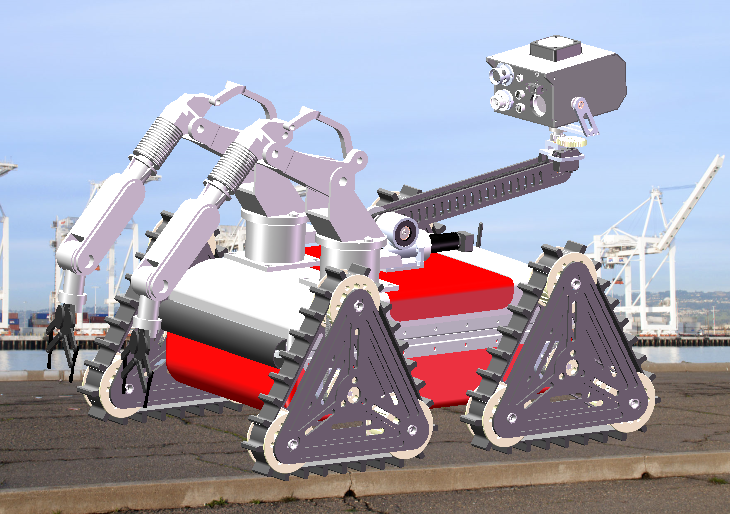
结构说明:我们制作的移动救援机器人主要由底盘、传动系统、电气控制系统、动力系统、机械臂及其他附属装置构成,体积小巧。我们在机身上设计了两个六轴机械臂,六个轴组成空间六杆开链机构,理论上可达空间任何一点。两只机械臂相互配合可以完成复杂轨迹的运动,可应用于危险环境探查、侦察、救灾、导盲、助残、搬运、清扫等任务。我们把摄像头设计在了一个多自由度机械臂上,通过机械臂的运动,可以灵活调整摄像头的拍摄位置,摄像头拍摄的视频材料可以通过信号发射器实时传输到救援指挥中心。当灾难发生时,救援机器人会先被派遣到灾难中心,将现场的情况传送给指挥中心,共指挥人员判断再决定救援计划,
功能与使用说明:我们将摄像头设计在了一个多自由度机械臂上,使得摄像头可以多角度、全方位的拍摄救援现场的环境。救援机器人器人可以灵活的进入灾害现场,不会收现场粉尘、火焰、化学污染等危险的影响,可以迅速的救出受害者,减少灾害损失。我们在机器人上设计了红外线传感装置和超声波检测装置,可以识别受害者和障碍物的位置。
设计原理:本设计在充分了解救援机器人的结构特点以及抢险救援环境的基础上设计出整体方案,利用Solidworks三维建模软件完成本设计零件和装配图建造,包括电动机、车架、摄像头、机架、机械臂、传动机构、车轮等,在此基础上完成虚拟样机制作、运动仿真、动画制作等。
产品特色:(1)我们将摄像头设计在了一个多自由度机械臂上,使得摄像头可以多角度、全方位的拍摄救援现场的环境。摄像头拍摄的视频资料可以通过内设的信号发射器及时传送到救援指挥中心,供指挥人员分析。
(2)救援机器人的四个车轮采用了星轮式结构,可以在楼道、山地、废墟等崎岖、复杂的环境下进行运动。
( 3 )我们在车身上设计了两个多自由度机械臂,两个机械臂相互配合,可以完成单一机械臂很难完成的任务,可应用于危险环境探查、侦察、救灾、导盲、助残、搬运、清扫等任务。
(4)车身上设计有GPS定位仪,能准确定位挖掘地点和施救地点。
(5)救援机器人上的红外热成像生命探测系统能及时感应到伤员的位置,并通过视频传输系统将采集到的画面实时传送到救援指挥中心,提高了救援的可靠性,扩大救援探测范围和准确性。
( 6 )为了尽可能的使所设计的产品具备实体化的可能,我们设计的非常精细,包括救援机器人内部的电路、传感器模块、电池包、继电器、传动装置等,都做了严谨的分析和设计。
(7)我们设计的救援机器人重量轻,体积小,灵活性高。可以适应多种复杂环境的需要。