
大赛作品详情
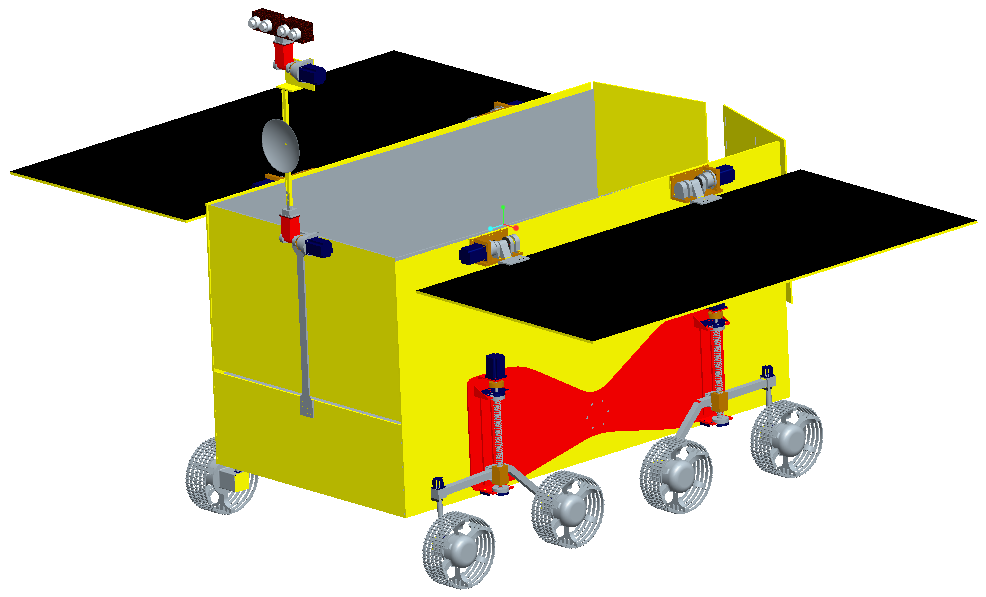
作品名称:擎天柱——运输月球车
学校名称:邯郸学院
参赛队伍:机械1队
参赛学生:赵得智 杜云超 胡阳
指导老师:高启明 吴莉莉


